 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2022年01月
Liu, Jixuan; Xu, Ke; Zhao, Chunpeng ; Zhu, Gang; Wang, Yu; Wu, Xinbao; Tian, Wei. Experimental and finite element analysis studies of a reduction-force reducing traction method for pelvic fracture surgeries[J].医学中新技术与新装备(英文),2022(1):9.
骨盆骨折是创伤骨科中最复杂的骨折之一,其特征是伴随骨段移位而发生的剧烈肌力骨折损伤;这些损伤约占所有身体骨折的3%-8%。骨盆骨折的发病率在50%-60%之间,而死亡率在13%以上。骨盆骨折治疗的困难在于克服由连接在骨盆上的肌肉和韧带施加的非常大的静态和动态力。超过40块肌肉与骨盆相互作用。Elabjer等人表明,髂腰肌在髂翼上提供最大的力(范围为640–1474 N;平均值为926 N)。此外,在复位过程中,手术医生的频繁抖动或突然动作可能会使肌肉拉伸力增加20倍。机器人辅助骨科手术(RAOS)已被用于各种骨科手术,是一种最先进的治疗技术。然而,机器人辅助骨折复位手术具有挑战性,因为目前可用的商用机器人无法在骨折复位过程中提供所需的足够输出力。Oszwald等人的最新版本的串行机械臂仅产生110 N的最大载荷,而其他商用机械臂仅提供16 kg的载荷。因此,至关重要的是,在复位手术过程中,减少针对强大肌肉阻力的复位力,减少手术外科医生的体力消耗,减少过度复位力造成额外伤害的可能性,并推广机器人辅助复位手术方法的使用。
创伤骨科医生采用了复杂的技术来减少骨盆复位过程中的阻力。牵引法通常用于骨盆骨折手术,用于克服肌肉阻力。然而,外科医生的手动牵引浪费了劳动力。在典型的骨盆复位手术中,至少需要四名外科医生来协助牵引,见图1。
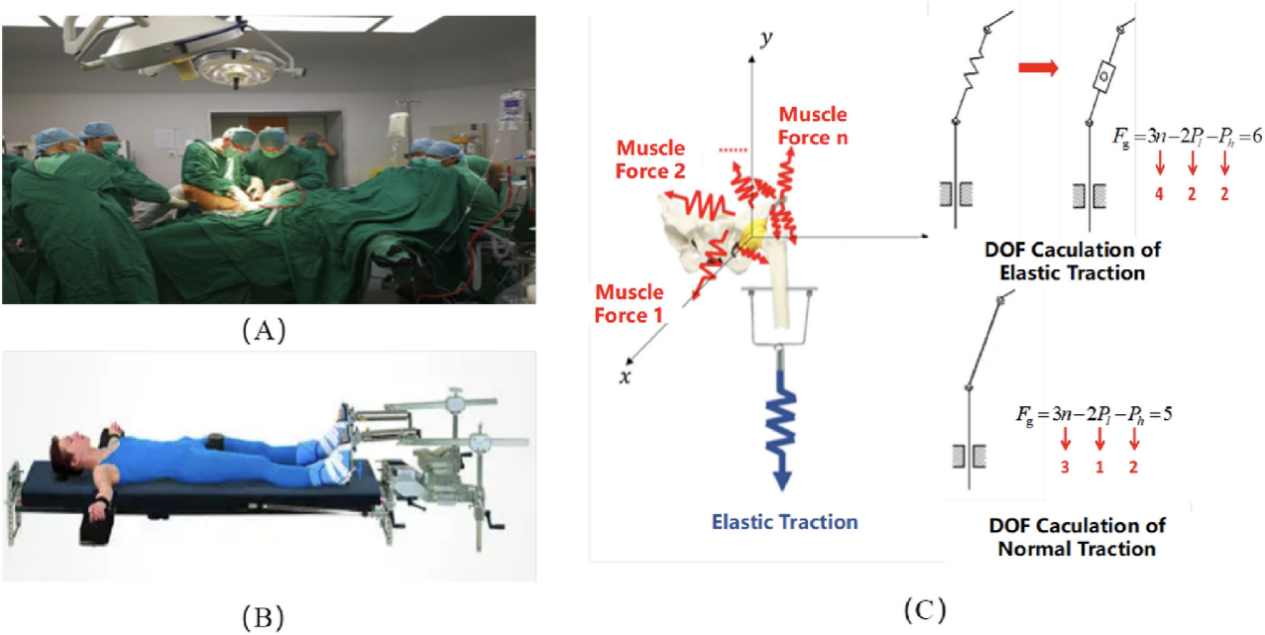
图1:(A)外科医生的手动牵引是一种巨大的劳动力浪费。(B)传统的带牵引靴的牵引台在复位过程中自由度有限。(C)弹性牵引装置示意图。
如图1(b)所示的传统牵引台,通常产生刚性牵引,只能实现轴向运动和绕牵引方向轴线旋转。这种刚性牵引显著限制了复位程序的灵活性,并增加了过度牵引的可能性,这可能会损伤手术患者的坐骨神经。
本文提出了一种弹性牵引装置,用于辅助骨盆骨折复位手术和复位力,同时保证操作灵活性。我们建立了一个带有弹性牵引装置的实验系统,并在正常和弹性牵引下进行了骨盆复位,以比较各方法在减力方面的性能。然后,建立骨盆复位有限元(FE)模型,并利用实验数据进行验证,进一步考察了所提弹性牵引方法的优势。此外,我们通过施加减少骨盆所需的复位力来模拟不同的弹性牵引力,并找到最佳牵引力。我们还探索了在临床应用中使用所提出的弹性牵引方法的可能性。
2.方法
2.1.弹性牵引原理
弹性牵引装置在牵引弓和末端执行电机之间具有弹性元件,可以随着牵引距离而连续变形。由于这种变形,弹性元件可以储存和释放动能。图1(c)示意性地显示了弹性牵引装置。弹性牵引装置的自由度(DOF)数可按如下方式计算:

其中,Fg是弹性牵引装置的DOF的数量,n是部件的数量,Pl是具有低DOF的运动学对的数量,Ph是具有高DOF的动力学对的数量。根据等式(1),弹性牵引装置有六个自由度,而正常牵引只有五个自由度。弹性牵引装置的额外自由度确保了其灵活性。
2.2.骨盆骨折复位实验
图2(a)为本系统的示意图。骨盆骨折模型使用两个被动臂固定在手术床上。每个被动臂都由七自由度(7-DOF)装置和一个连接到床边缘的专用夹具组成。两个带有NDI跟踪器的专用力传感器连接到克氏针的末端,用于测量复位过程的方向。每个力传感器都包含一个6 轴力传感器,用于记录各个方向的力。牵引装置包括牵引弓和弹性单元。该系统由驱动单元、57步进电机、电机减速器和线性单元提供动力。图2(b)显示了弹性牵引系统的组件。
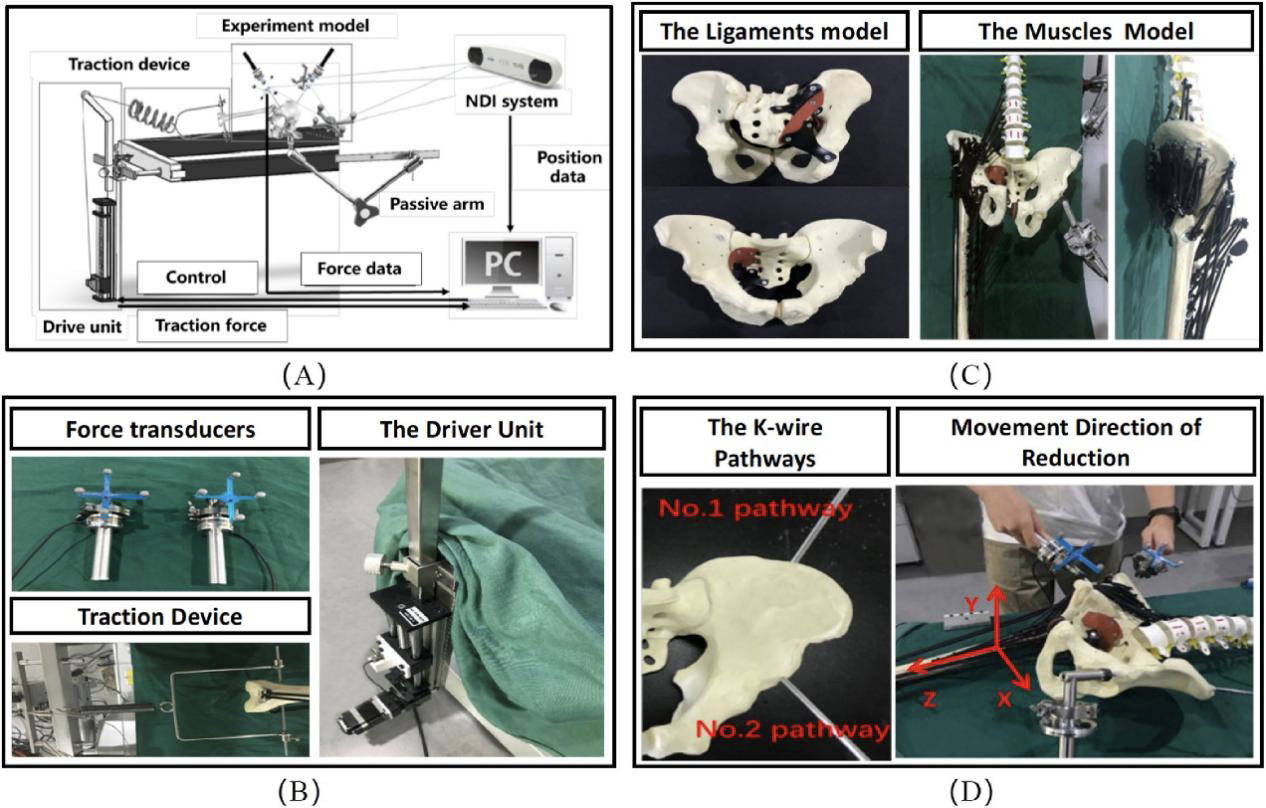
图2.(A)实验系统的示意图。(B)弹性牵引系统的组件,包括驱动单元、定制的力传感器和牵引装置。(C)骨盆复位模型,包括肌肉和韧带约束。(D)1号通路是从髂前上棘到髂骨的翼骨,克氏针1穿过髂骨。克氏针2 穿过髂前下棘到坐骨大切迹。(左);骨盆需要沿正 X 轴和负 Z 轴移位2 厘米(右)。
我们在模型中包括了以下骨盆韧带:后骶髂韧带-短韧带、后骶髂韧带-长韧带、前骶髂韧带、骶髂骨间韧带、骶棘韧带和骶结节韧带。除这些韧带外,我们实验中的肌肉还包括臀大肌、臀中肌、臀小肌、髂肌、股直肌、阔筋膜张肌、胸胶、半肌腱肌、半膜肌、大内收肌、长收肌、短收肌、梨状肌、腰肌腰肌和腰方肌。我们的骨盆复位模型的完整视图如图2(c)所示。
我们进行了骶髂关节脱位的骨盆骨折复位手术,并分别进行了5 kg 和10 kg 弹性牵引和正常牵引的实验。根据Bishop的研究,选择了两条骨固定通路来插入克氏针。我们将工作平面定义为XZ平面,将下肢牵引方向定义为Z轴,将水平方向(垂直于脊柱)定义为X轴,以构建笛卡尔坐标系。克氏针通路的位置和骨盆复位运动的方向如图2(d)所示。此外,我们使用该实验系统收集了 克氏针1 复位力的临床数据。
2.3.骨盆骨折复位的有限元分析
我们的骨折复位有限元模型包括四个步骤。
1、将一组骨盆完整的计算机断层扫描(CT)数据导入 MIMICS(比利时鲁汶 Materialize),用于重建骨盆、左股骨和从 L1到 L5的五个腰椎的几何形状。
2、将生成的 STL 文件导入到 Geomagics Studio 中,用于生成非均匀有理 B 样条曲线(NURBS)包裹曲面。
3、将生成的 IGES 文件导入 SolidWorks(法国达索系统),用于重建皮质骨、松质骨、软骨和其他组件(基什内尔销和牵引弓)。
4、将STEP格式文件导入Abaqus(法国达索系统),用于生成有限元网格和后续仿真。三维骨盆复位模型生成和有限元分析步骤的概述如图3 所示。
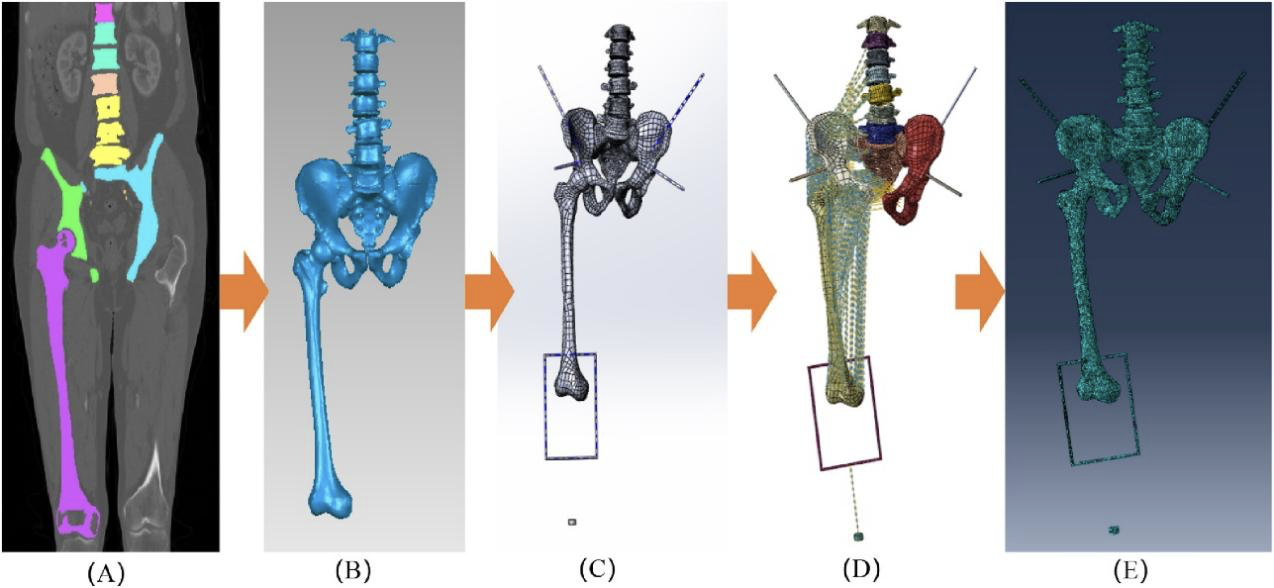
图3.FE骨盆复位模型生成概述:(A)模型分割(B)模型优化和NURBS包裹面生成(C)模型组装(D)韧带和肌肉约束施加(E)FE网格生成并进入分析。
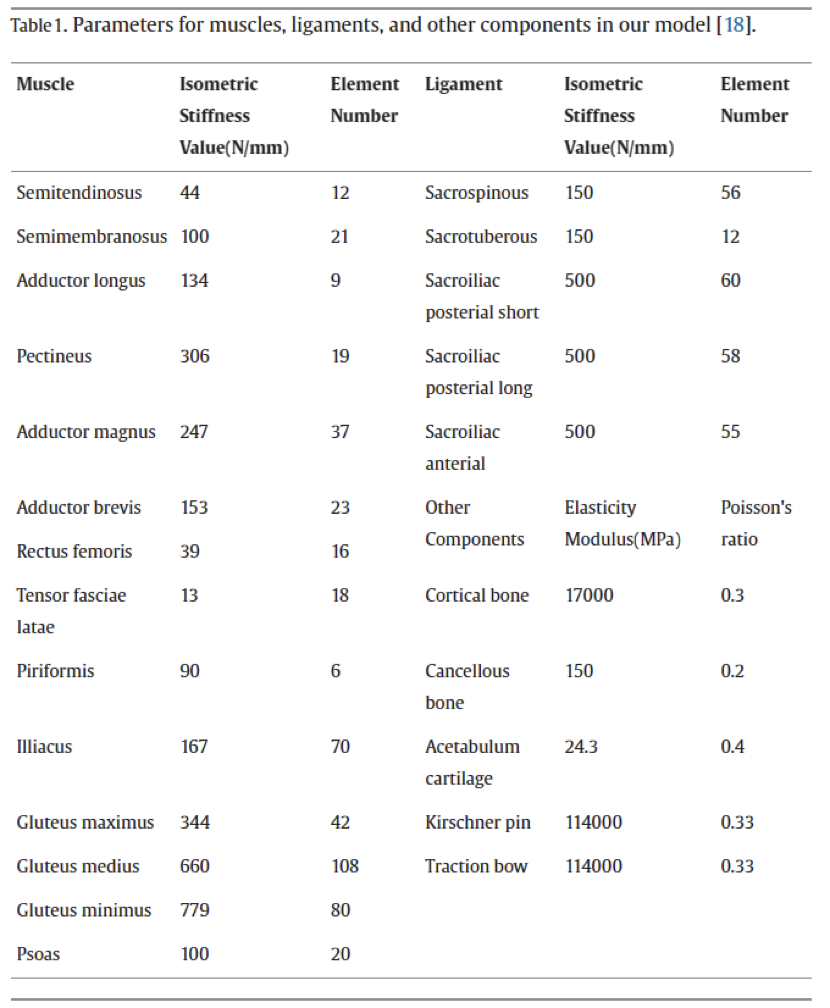
关于肌肉和韧带的弹性假设广泛用于许多复杂的肌肉骨骼模型。我们通过在肌肉附着点之间的 Abaqus 中构建轴向连接器来模拟肌肉和韧带。轴向连接器仅在拉伸时表现出刚度,其压缩刚度为零。根据Phillips的研究,肌肉和韧带参数的具体值列于表1中。
骨盆骨折的复位过程包括两个分析步骤:
1)牵引分析,其中施加牵引力以达到或接近平衡状态;
2)复位分析,在外力作用下骨盆复位。
3.结果
3.1.临床试验
我们还进行了临床试验以验证实验系统。在临床试验中,记录了克氏针1在非牵引条件下的复位力。图4(a)显示复位力与时间有关。我们计算了在最大力时间对称分布的1 s 宽窗口上的平均复位力。该临床试验的平均力为85.08 N,模型试验的平均力为87.41 N。错误率为2.6%[图4(c)]。
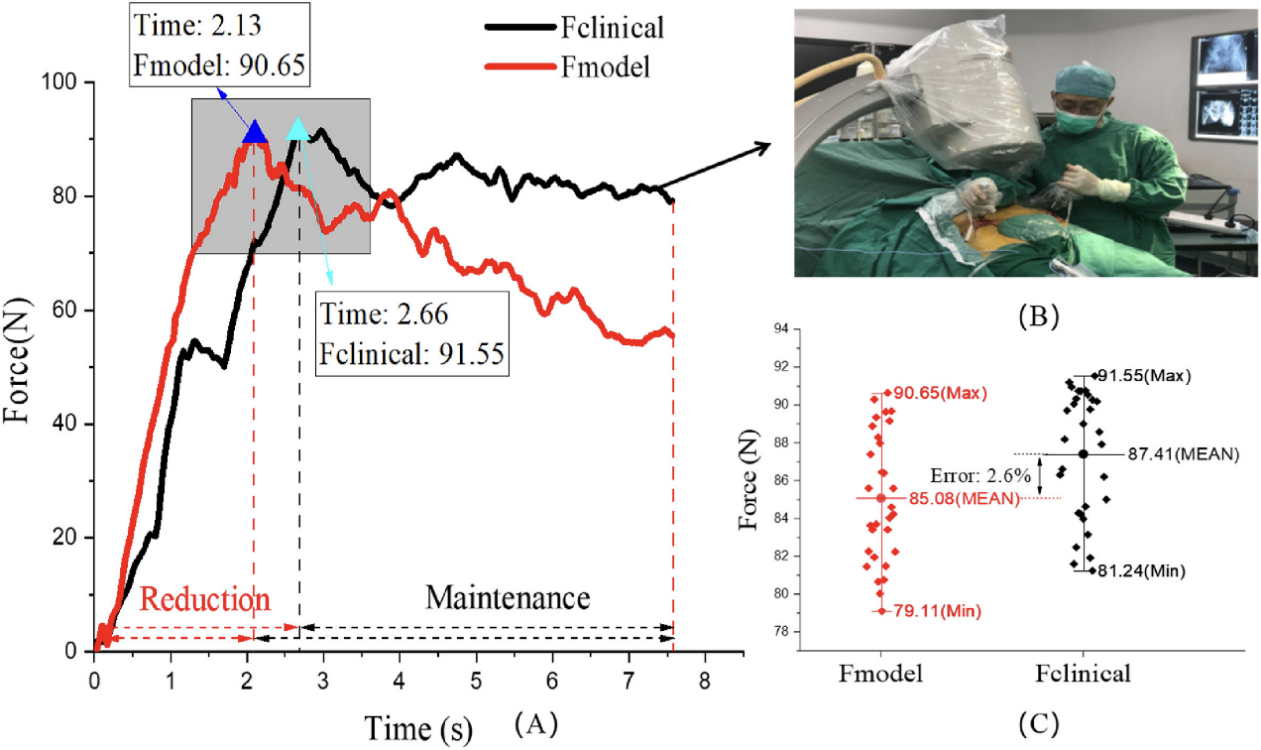
图4.克氏针1 (A)的复位力。(B)(C)演示临床试验。临床试验中的最大力为90.65 N,出现在2.13秒处。
3.2.实验结果
我们使用我们提出的实验系统总共测试了五种实验条件,包括无牵引力的场景(“无牵引力”)、5 kg正常牵引力的场景、5 kg弹性牵引力的场景、10 kg正常牵引力的场景和10 kg弹性牵引的场景。从这些结果中,我们得出结论,法向牵引力和弹性牵引力都降低了克氏针1的复位力,如图5(a)所示。5 kg和10 kg正常牵引情景下平均最大复位力分别下降了20.47%和33.23%,5 kg和10 kg弹性牵引情景下平均最大复位力分别下降了47.41%和59.2%。
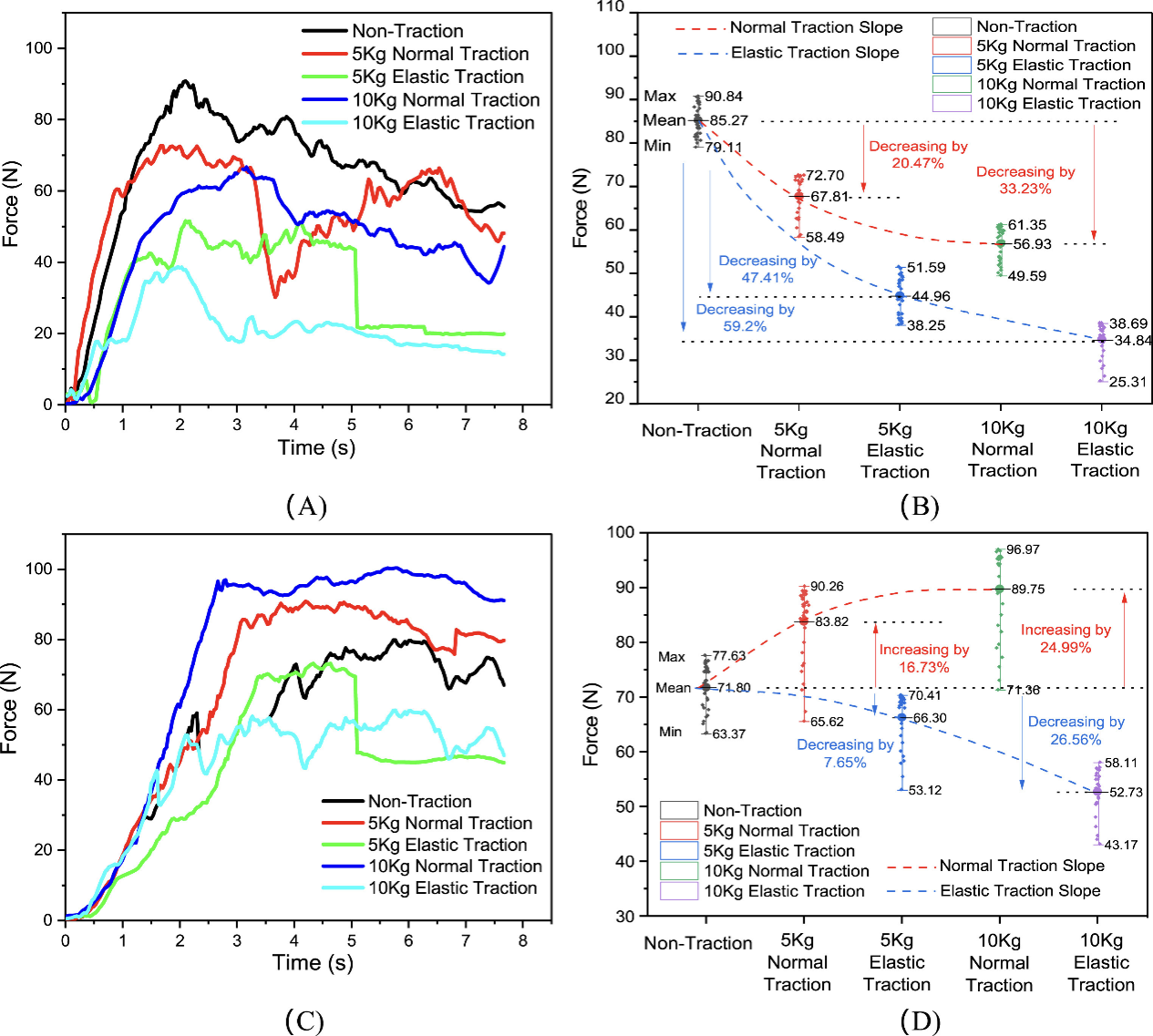
图5。克氏针1(A)和克氏针2(C)的复位力在不同的牵引力下随时间变化。克氏针1(C)和克氏针2(D)最大力的平均值及其递减率。
对于克氏针2,结果不一致,如图5(c)所示。5 kg和10 kg正常牵引情景下平均最大复位力分别增大了16.73%和24.99%,5 kg和10 kg弹性牵引情景下平均最大复位力分别减小了7.65%和26.56%。因此,弹性牵引力在降低复位力方面表现更好。
3.3.仿真结果
在牵引力分析步骤中,仿真分析步骤的宽度设置为3 s,与实际实验相同。通过将参考点设置在克氏针1处,监测该点的位移,并推断骨盆的位置变化。图6(a)显示了 克氏针1 的位置变化。结果表明:在相同牵引力下,弹性牵引下的位移比正常牵引下的位移更显著;
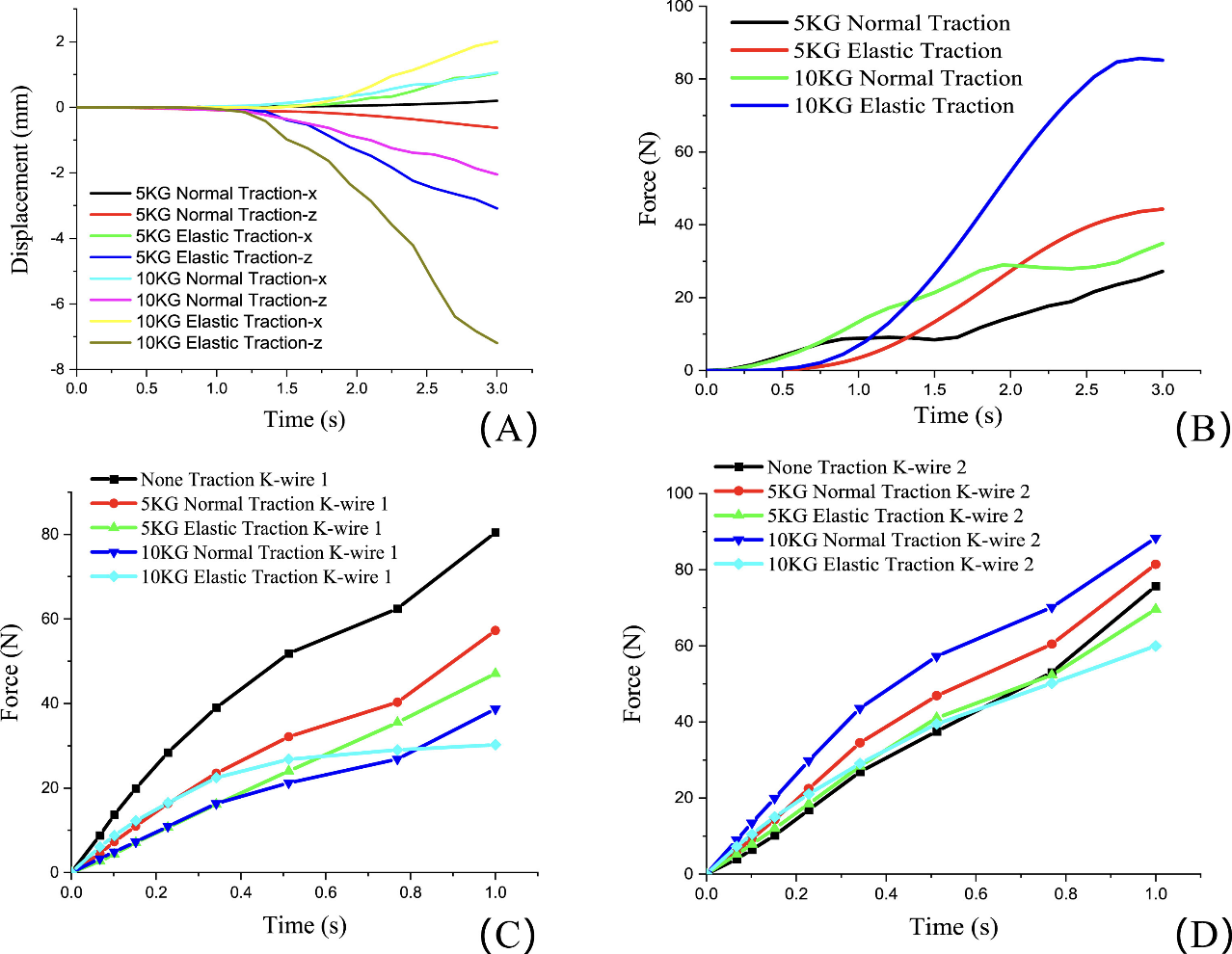
图6.克氏针1在牵引分析步骤(A)中的位置变化。两种牵引方式下的综合肌肉阻力曲线(B)。复位步骤分析过程中克氏针1(C)和克氏针2(D)的复位力。其中K线代表克氏针。
此外,我们比较了使用两种牵引方法的综合肌肉阻力。由于骶骨、腰椎和右髂骨在复位模拟过程中没有改变其位置,并且被认为是一个刚体,因此我们在骶骨处设置了另一个参考点。此时的反作用力是抵消牵引力的综合肌肉阻力,如图6(b)所示。弹性牵引的综合肌力变化比正常牵引更平稳、更快,表明弹性牵引方法在牵引方面比正常牵引更有效,允许在相同时间段内牵引得更远,更快地达到静态平衡。
图6(c)和 (d)显示了 克氏针1 和 克氏针2 在还原分析步骤中的复位力。仿真结果与实验试验结果一致,克氏针1的复位力在正常牵引和弹性牵引下均有所减小,而克氏针2的复位力仅在弹性牵引下略有减小。发生这种情况是因为 克氏针1 施加的力主要提供向下的位移(Z 轴),与牵引力的方向一致,并由牵引力减轻。相比之下,克氏针2 施加的力提供了水平位移(X 轴),并且由于施加的牵引力,沿该方向的肌肉阻力变大表2 列出了这些数据的值,并显示了模拟和实验之间的错误率。
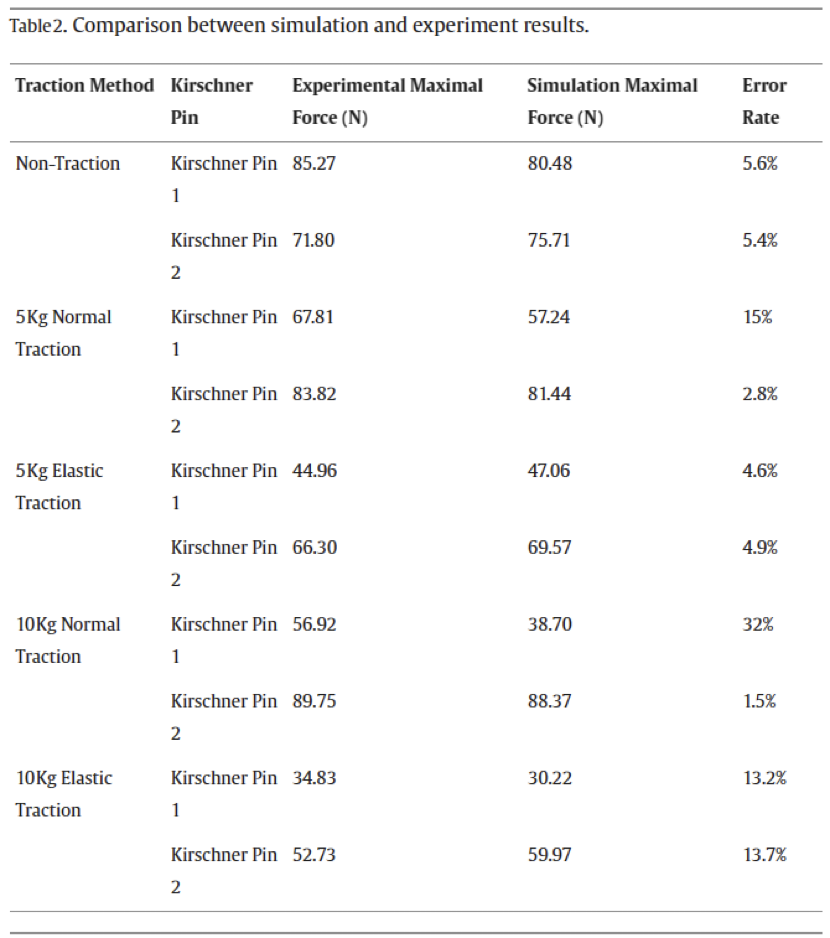
表2结果显示,模型结果与实验结果吻合良好。除正常牵引工况外,大部分受力误差率均在10%以下。克氏针1 的实验复位力远大于模拟的正常牵引力场景。这可能归因于在手动骨盆复位过程中缺乏对骨盆复位力的精确控制。传感器获取的力学数据是违规的,极易受到手动操作的影响。弹性牵引力模拟结果与实验结果吻合较好,表明极限牵引力弱于正常牵引力。
3.4.肌肉阻力分析
为了说明弹性牵引方法的优点,我们在牵引分析步骤中分解了组合的肌肉力,如图所示。第7(a)段。对于弹性和正常牵引方法,腰大肌阻力是主要的肌肉阻力,因为它需要进行显著的拉伸才能实现骨盆向下的复位。对于弹性牵引,结果表明,包括骶结节韧带和骶髂后韧带在内的韧带阻力更为显著,这主要是由骨盆复位引起的。另一方面,对于正常的牵引,长收肌、梳状收肌和短收肌提供了更多的肌肉阻力,因为所施加的牵引力沿着非牵引方向增加了肌肉阻力。
因此,弹性牵引和正常牵引的主要区别在于髋关节肌群的阻力。髋关节肌肉阻力是由于骨盆和股骨在非复位方向上的相对位置发生变化而产生的,如图中Y方向所示。Y方向上相对位置的变化导致额外的收缩力,不利于骨盆复位。图7(B)为骨盆的von Mises应力云图。结果表明,正常牵引时臀小肌和臀中肌的应力比弹性牵引时更显著。我们得出的结论是,大部分弹性牵引力都是收缩骨盆,不利于骨盆复位。
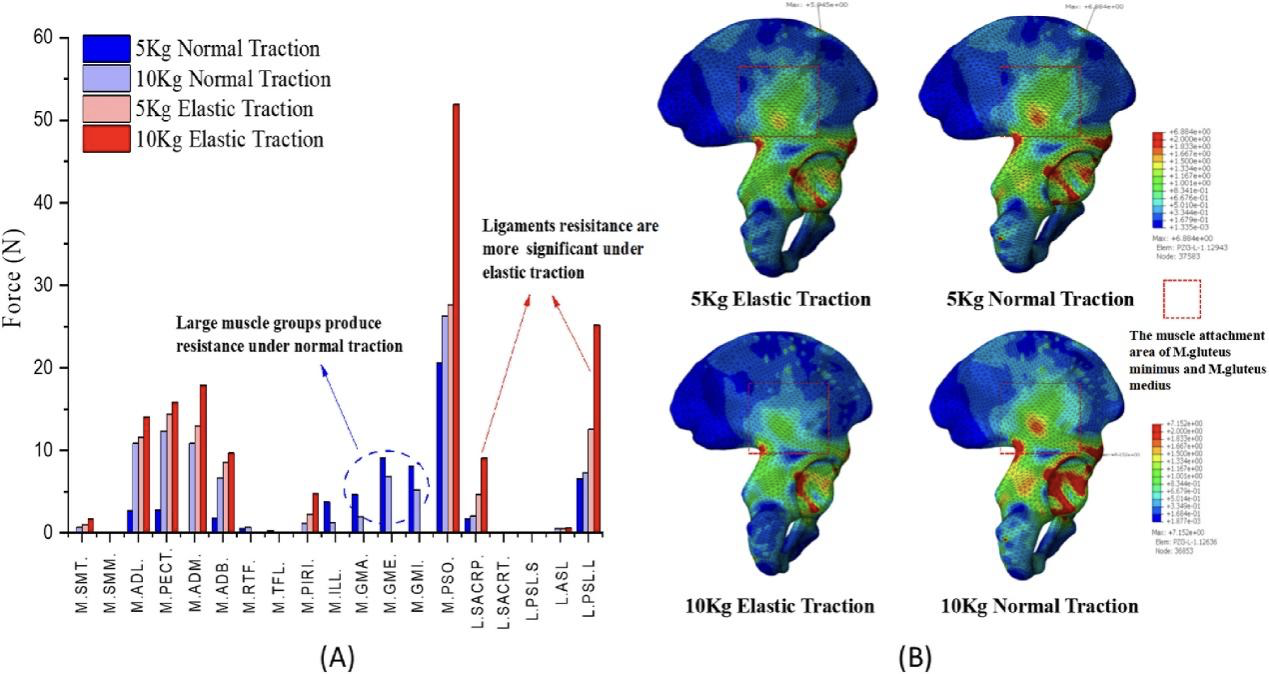
图7。组合肌肉阻力的分解(A)和骨盆的Mise应力云图(B)。
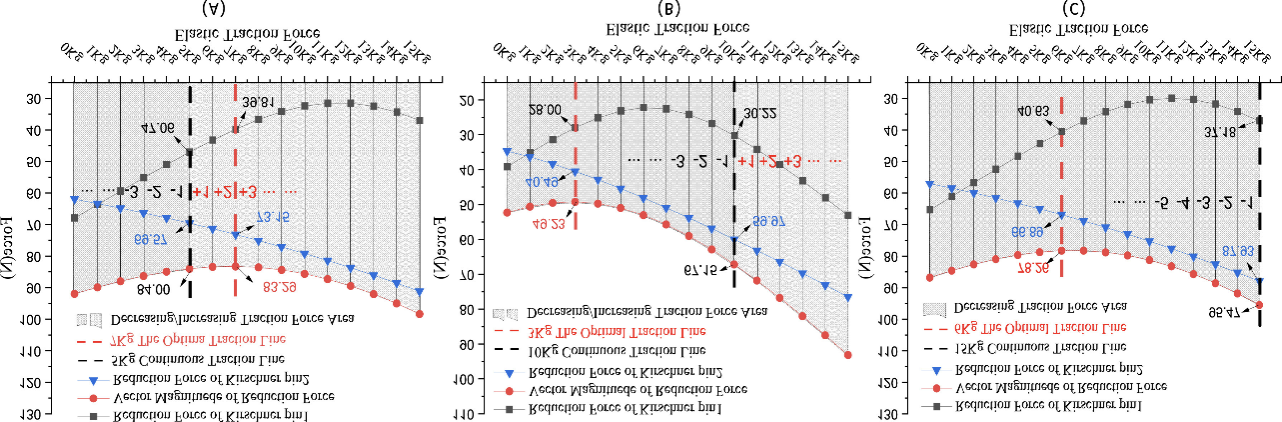
图8.(A)在牵引分析步骤中牵引力为5 kg的情况下,克氏针1、克氏针2的复位力和克氏针的矢量大小力在施加各种弹性牵引力下发生变化。(B)和 (C)是在牵引分析步骤中施加10 Kg 和15 Kg 牵引力的情况。
此外,动态牵引策略在减力方面的表现优于连续牵引。我们在0-15 kg 范围内改变了在复位分析中施加的牵引力。图8(a)、(b)和(c)显示了牵引分析步骤中5 kg、10 kg和15 kg牵引力情景的结果,其中复位分析步骤的最佳牵引力分别为7 kg、3 kg和6 kg。采用动态牵引法得到的最小矢量幅值减小至49.23 N,远小于连续牵引法的67.15 N。
4.讨论
在这项研究中,我们进行了实验和有限元模拟,以确定弹性牵引在骨盆骨折复位过程中的作用。利用实验数据对建立的模型进行了验证,并利用该模型对其他场景进行研究和分析,以确定弹性牵引的适用规则。目前,骨盆模拟主要分析骨盆骨折的生物力学行为或诱发骨折所需的外力。大多数骨盆模型采用有限元分析方法分析交通事故对骨盆骨折的外力、不同骨盆姿势的韧带和肌肉应力、轨迹选择和螺钉植入物的寿命分析。只有少数研究集中在骨盆骨折复位和复位过程中肌肉阻力和复位力的分析上。
我们通过实验和模拟研究比较了正常牵引和弹性牵引方法在骨盆复位方面的牵引效率。两种牵引方式均减小了克氏针1的复位力。然而,对于克氏针2,只有弹性牵引法降低了复位力。弹性牵引法在降低复位力方面比普通牵引法具有相当大的优势。它具有多自由度、可变形的特点,可以减少髋部肌肉群的阻力产生,不利于骨盆复位。但是,施加的弹性牵引力是有限的。典型的临床牵引力为15-20 kg,但我们的模拟结果表明,最佳牵引力为10 kg 或10-15 kg 范围内。此外,在临床环境中,动态牵引力可能优于恒定牵引力。
机器人辅助复位手术因其不可替代的优势,是骨盆复位手术的新趋势。在骨盆复位机器人的集成系统中应用弹性牵引力将促进机器人系统在临床应用中的使用。在后续工作中,我们将研究弹性牵引力施加的调整策略。此外,我们计划进行更多的临床测试,以获得骨盆复位期间的机械数据,并改进我们的模拟模型。我们希望总结弹性牵引在机器人辅助骨盆复位手术和不同骨盆骨折中的应用策略。
在骨盆复位术中应用牵引力有助于减少进行复位手术的医生的体力消耗。对于手术患者来说,较低的复位力也使复位手术更安全。弹性牵引在各种需要牵引的包括骨盆复位在内的手术中非常有前景。它可以显著减少手术外科医生的体力消耗,减少手术患者额外受伤的可能性,并且有助于机器人辅助复位手术。

