北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2022年02月
赵春鹏, 王豫, 孙旭, 等. 智能化骨折复位机器人系统辅助骨盆骨折微创复位的解剖学研究 [J]. 中华创伤骨科杂志, 2022, 24(5): 372-379.DOI: 10.3760/cma.j.cn115530-20220220-00100
骨盆骨折由于死亡率、致残率较高,其治疗一直是骨科医生面临的难题之一。传统的切开复位内固定方式虽然能在直视下完成解剖复位,但往往出血量大,容易造成血管、神经损伤及术后感染,需要较长的学习曲线。近年来,术中透视下闭合或微创复位内固定已成为一种新的治疗趋势,其具有出血少、感染率低、血管神经损伤概率低、术后恢复快的特点和优势。本研究团队在前期研究的基础上,自主设计和研发新的算法,将机器人应用于骨盆骨折的复位,利用尸体标本骨进行智能化机器人系统辅助骨盆骨折微创复位的实验研究,完全模拟临床手术环境,为进一步临床试验及应用研究奠定基础。
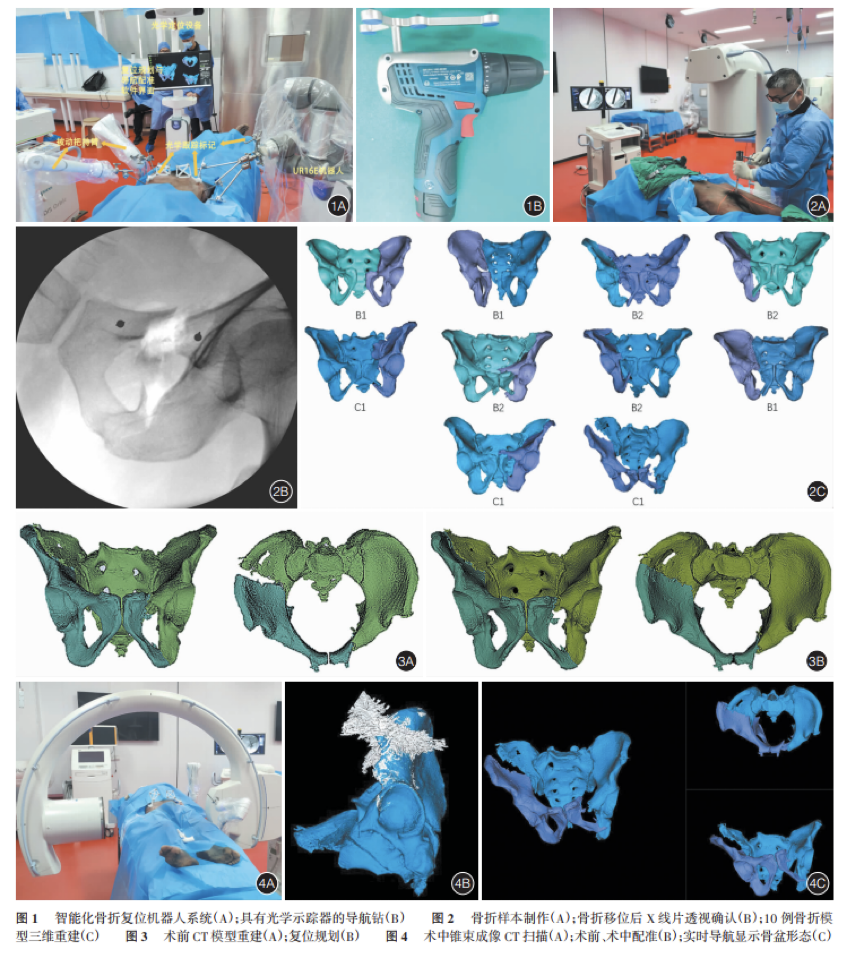
本研究实验对象为10具成人大体标本,建立不稳定骨盆骨折模型,依据Tile分型分为:B1型3例,B2型4例,C1型3例。本研究中的基于视觉的智能化骨折复位机器人系统由4部分组成,包括骨盆骨折复位软件、复位机器人、骨盆把持设备、光电跟踪装置。
实验方法如下:
1.骨折样本制作:根据参考的临床病例骨盆骨折三维影像的骨折形态、位置,采用经皮或小切口对尸体标本骨盆前后环相应部位进行截骨,制作对应骨盆骨折。
2.术前规划:常规拍摄骨盆三维CT,通过计算机软件将骨盆骨折影像分割并重建成健侧和患侧2部分。
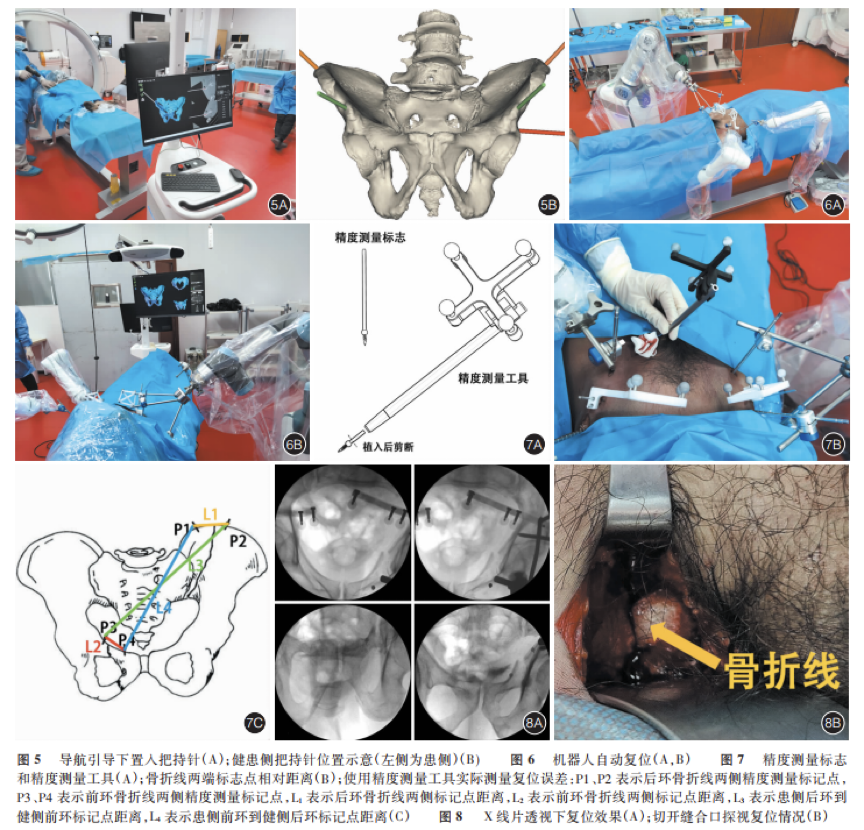
3.术中配准与导航:体表找到两次髂前上棘安装光学示踪器,并使用锥束成像CT进行三维扫描重建,传入计算机系统构建实时显示骨盆相对位置的虚拟环境。基于导航方案,在健侧和患侧分别置入斯氏针。
4.机器人自主复位操作:机械臂通过把持斯氏针,根据术前完成的复位规划,首先尝试在不添加中间路点的情况下缓慢移动患侧半骨盆。若不能复位解剖结构,则在规划路径中添加路点,先分离解锁骨折部位,再缓慢移动患侧骨盆至规划复位目标位置。
5.精度测量:机器人完成复位并保持后,使用C型臂Ⅹ线机械臂进行入口位、出口位透视确认,由术者依据X线片评估骨折复位优良程度,并手指探查骨折端复位优良程度。
结果显示,术中配准导航时间平均为47.4 min(32~74 min);自主复位时间平均为73.9 min(48~96 min);手术总时间平均为121.3 min(83~170 min)。基于光电跟踪装置及术中配准导航技术,智能化骨折复位机器人系统能够实现把持针精准导航。在此基础上,基于骨折端三维实时跟踪与显示,机器人可以在临床医生监督下完成骨折自主复位,顺利完成标本骨折复位实验。经复位后X线透视验证,骨盆前后环的完整性得以恢复,两侧解剖标志对称。平移和旋转移位在临床上可接受;切口可直接显露骨折端,复位效果良好,满足微创内固定术需求。进一步分析10例骨折模型复位误差,计算各复位距离偏差的平均值△L作为复位误差,复位误差为1.67~2.62mm(平均为2.02mm)。依据Matta标准,所有标本复位误差均<4mm,复位质量均为优。
智能化骨折复位机器人系统可以辅助完成骨盆骨折的闭合复位,复位过程符合 临床手术流程,具有较高的复位精度和操作可行性,同时彻底避免了传统手术过程中医生的放射暴露, 为临床骨盆骨折微创复位提供了一种新方法