 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2022年03月
Ge Y, Zhao C, Wang Y, Wu X. Robot-Assisted Autonomous Reduction of a Displaced Pelvic Fracture: A Case Report and Brief Literature Review. J Clin Med. 2022 Mar 14;11(6):1598. doi: 10.3390/jcm11061598. PMID: 35329924; PMCID: PMC8950953.
对骨科医生来说,移位骨盆骨折的治疗一直是个挑战。骨盆环形的不规则结构以及周围复杂的解剖环境使得骨盆骨折的复位需要骨科医师具备熟悉的外科知识、熟练的手术技巧,对于年轻医师来说,学习曲线较长。术中为了达到满意的复位效果,往往需要多名外科医生齐心协力,花费较多的时间和精力,也因此,骨盆骨折的手术常对患者造成较大的创伤,伴随较高的神经血管损伤风险。
21世纪以来,随着器械、科技进步,骨科医师一直在探寻治疗骨盆骨折的微创方式。骶髂螺钉的置入、天玑机器人辅助下导航固定以及经皮LC2螺钉置入等,都是对骨盆骨折固定方式的微创精进,现已在全国广泛推广并应用。而在移位骨盆骨折的复位方面,少有学者探索。国外学者Matta首先尝试将健侧半骨盆固定于手术台以助复位,Lefaivre研究出Starr架进一步辅助骨盆固定和复位,释放人力。国内唐佩福团队在Lefaivre研究基础上,结合计算机辅助导航系统,研发出基于Starr架的微创复位方式,但过程依然由手术医师进行规划指导。
北京积水潭医院和北京罗森博特科技有限公司,针对移位骨盆骨折的复位治疗,近年来合作研发出一款机器人自主复位系统。该系统可以自主识别骨折形态,基于骨盆对称性自主规划移位侧骨盆的复位路径、自动完成复位过程,并在复位后计算复位质量。该系统主要由一个中心部分和其余辅助部分组成,中心部分有三个组件(图1):一个光学跟踪装置,一个辅助规划和导航的算法控制软件,以及一个机械臂复位装置。辅助部分包括两个组件:一个是弹性牵引系统,辅助骨盆复位、减小复位时机械臂所需的复位力;另一个组件是被动臂装置,辅助固定健侧半骨盆。

图1 机器人复位系统图示
本文章报道了该骨盆骨折自主复位机器人的首次临床应用,介绍机器人导航下骨折复位及固定的具体步骤。56岁男性,因“重物砸伤致左髋部疼痛6小时
”就诊于我院急诊,患者血流动力学稳定,伤后无法行走,检查示骨盆骨折(Tile B2)(图2)。伤后3天在复位机器人辅助下行闭合复位内固定手术治疗。手术步骤主要分三步。
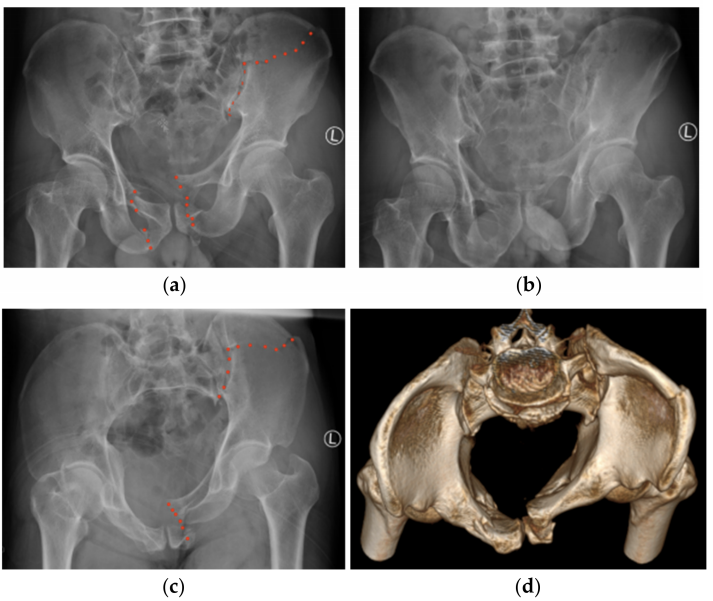
图2 骨盆骨折X线和CT检查
第一步,准备工作。两侧髂嵴装配追踪器(Tracker),结合光学追踪装置,行锥形束计算机断层扫描(CBCT)以获得图像登记。接着,在患侧股骨远端安装弹性牵引装置。为方便之后的复位和固定,在带有tracker的跟踪手钻帮助下,从健侧预置两根骶髂螺钉导针。两侧髂骨置入把持螺钉(左侧三根;右侧两根,图3),分别连接左侧机械臂和右侧被动臂装置。
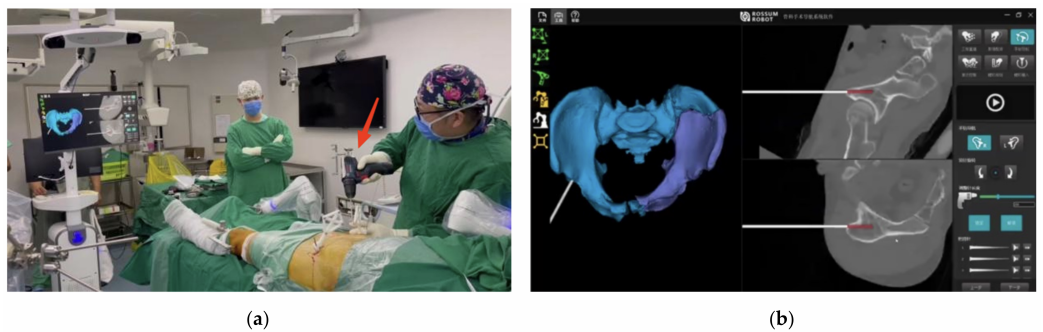
图3 双侧髂骨把持钉的置入
第二步,基于镜像原理、利用骨盆对称性复位移位骨盆骨折。模拟的完整骨盆形态是以正中矢状面为镜,将健侧半骨盆上的近十万个点镜像至对侧进行患侧半骨盆模型图像的重建。规划时,软件根据骨折形态、骨折块位置自主规划复位路径至模拟的复位位置。规划后,机械臂将利用三根把持钉合力复位骨折,全过程实时追踪。复位完成后,利用术中透视检查复位质量(图4)示复位优良。
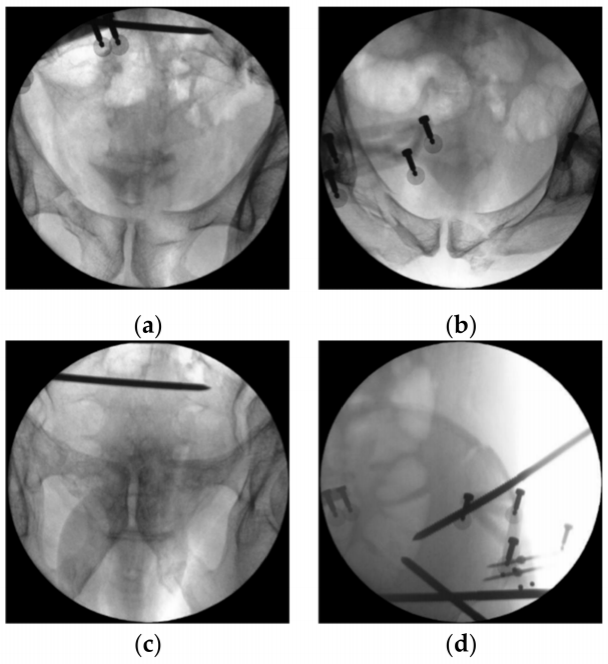
图4 术中透视示复位优良
第三步,经皮固定。利用第一步中预置的骶髂导针贯穿患侧辅助患者后环骶髂螺钉的迅速置入,前环两侧耻骨支分别行两枚经皮逆行螺钉固定。手术总时间为110分钟,失血量50毫升,无并发症发生。
术后CT扫描示复位后骨折最大移位为2.8mm,据Matta复位标准为优。术后三月随访,患者可独立行走,日常生活无限制,Majeed评分为95分。影像学复查无异常。
本病例是该骨盆骨折复位机器人的首次临床应用,未来更多的临床研究将证明该自动复位机器人的有效性和安全性。随人工智能的不断发展,骨盆骨折的精准、微创治疗也将迈入新的阶段。

