 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2022年04月
Zhao C, Wang Y, Wu X, Zhu G, Shi S. Design and evaluation of an intelligent reduction robot system for the minimally invasive reduction in pelvic fractures. J Orthop Surg Res. 2022 Apr 4;17(1):205. doi: 10.1186/s13018-022-03089-2. PMID: 35379278; PMCID: PMC8981738.
骨盆骨折是所有骨折中致残率和死亡率最高的严重高能量损伤。传统的开放手术可能会导致广泛的软组织损伤和许多并发症。微创手术潜在地降低了开放手术的风险。准确的复位已被公认为骨盆骨折微创手术的前提。目前,骨盆骨折的闭合复位受限于目前欠佳的二维术中影像(透视)。我们开发了一种用于骨盆骨折的智能机器人辅助骨折复位系统robot-assisted fracture reduction (RAFR),包括术中实时三维导航、复位路径规划、控制和固定以及机器人辅助的骨折复位,然后对图像配准精度和骨折复位精度进行了计算和分析。我们使用该系统在20个骨盆骨折模型上试验,结果:20个骨盆骨折模型均使用RAFR系统复位,E1为1.29±0.57 mm,E2为2.72±0.82 mm。这表明RAFR系统能够达到临床环境的要求。我们的研究证明了我们的RAFR系统的准确性和有效性,以及它在临床实践中的适用性和可用性,从而为机器人微创骨盆骨折手术铺平了道路。
(一)建立骨盆骨折模型
北京积水潭医院20名匿名健康志愿者的正常骨盆CT扫描(12男,8女,年龄从25~72岁)以DICOM格式导入到MIMICS软件中,再用3D打印机(RS6000, union tech co. Ltd, China)制成模型。选择本院骨盆骨折临床病例20例,按Tile分型,B1型6例,B2型8例,C1型6例。根据这20例临床骨盆骨折的骨折形态,对20例骨盆3D打印模型进行截骨术,模拟这20例骨盆骨折。最后,我们为我们的研究建立了20个骨盆骨折模型(图1)
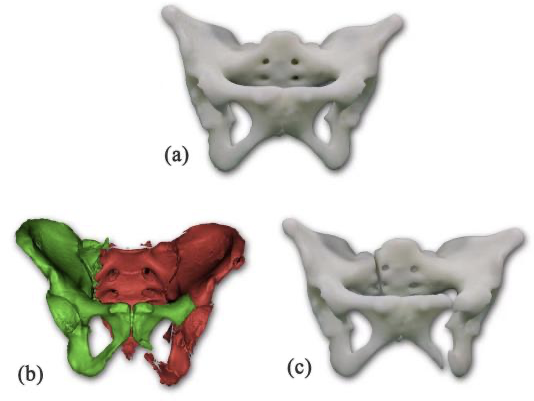
图1:(a)制作健康患者的完整骨盆的3D打印实验模型。(b)骨盆骨折患者CT扫描重建骨折形态。(c)根据骨折形态截骨制作骨盆骨折模型
我们为每个骨盆模型选择健侧为F1,骨折侧为F2,如图2所示。将直径3 mm的金属球粘贴在骨盆模型上,以供医生进行准确性分析。我们在骨折的一侧贴了六个金属球。6个球的位置分别为:髂前翼、髂后翼、髋臼、骶骨、耻骨上支和耻骨下支。健侧还粘贴了3个金属球,分别位于髂前翼、髂后翼和髋臼外侧。
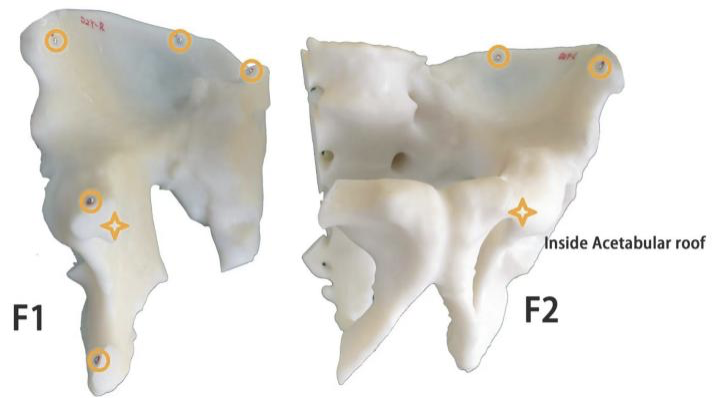
图2:用于精度分析的金属球的位置
(二)RAFR系统的算法
术中实时三维导航在骨盆模型的两侧髂骨上安装光学跟踪标记(Tracker),采集骨盆模型的CT数据和锥束CT(CBCT)数据。根据采集到的骨盆模型的CT数据,利用医学图像处理软件分别重建骨盆侧面模型和Tracker模型。根据采集的骨盆模型的CBCT数据,用医学图像处理软件重建双侧骨盆模型。然后,导航配准软件将重建的高分辨率CT模型与CBCT模型配准,可以实时跟踪骨盆模型的位置并显示在屏幕上。
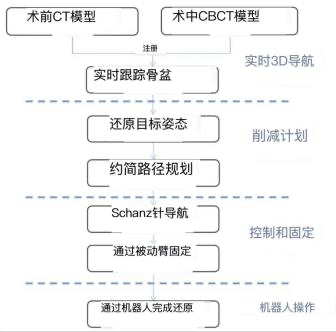

图5:实时3D导航
(三)术中实时三维导航
基于人体镜像对称原理,健侧骨盆的镜面模型可作为损伤侧骨盆的解剖位置。将移位的骨折碎片转移到其解剖位置所需的3D方位可以通过全表面配准来计算。医生可以对F2的目标位置进行轻微的调整,最终产生临床满意的复位目标位置(图6)。基于目标位置,RAFR系统开发了一种采用最短路径规划的自动归约算法,并显示了规划的归约过程。如果在复位过程中发生任何撞击,外科医生可以手动设置一个或多个路径点以避免撞击。骨折块按顺序移动到路径点,最终到达目标位置。
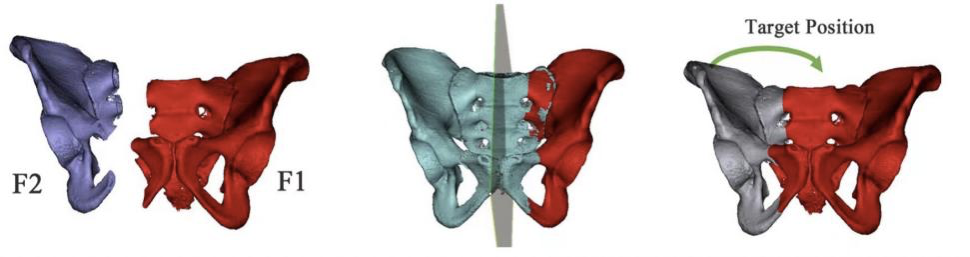
图6 骨盆对称性复位,利用骨盆另一侧的物理对称性获得复位靶位
(四)控制和固定
要达到骨盆骨折的复位,需要保持F1固定,控制F2骨折碎块移动到复位的目标位置。为了实现术中对健侧骨盆(F1)的快速固定,设计了一种6自由度快握臂,可以快速锁定和解锁,并提供超过40公斤的握力,取代了传统的床边固定框架。临床上常用Schantz钉固定骨折块。在本研究中,我们设计了一个手钻导航系统。导航软件可以计算出Schantz销的最佳放置位置。在手钻上安装了跟踪器,软件可以实时显示Schantz销的位置和深度,如图所示。
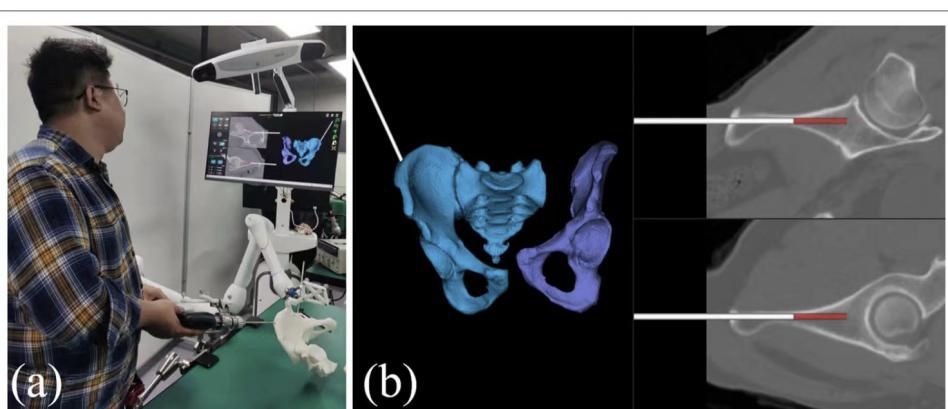
图7:手钻导航系统(a)的Schantz销放置,(b)导销的实时显示
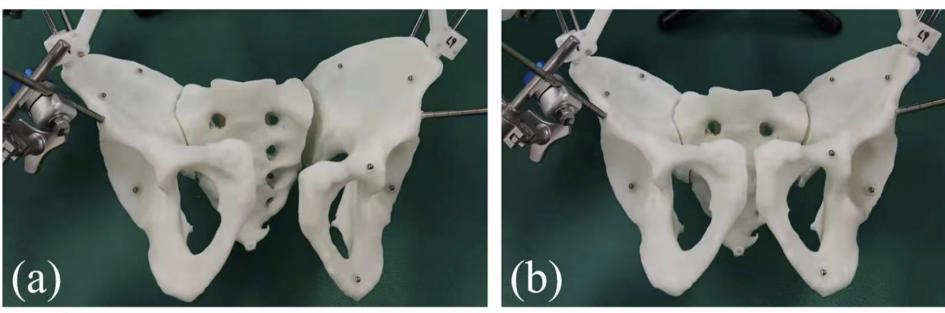
最后,骨折碎片移动到目标位置,机器人的主动复位完成,如图8所示
(五)复位结果的评价
导航精度是评价减速机器人系统性能的重要指标。导航系统的准确性通常通过术前或术中图像与跟踪器获取的目标骨骼的实时位置和术中透视之间的配准精度来评估。为了评估三维实时导航算法在运行过程中的精度,我们设计了导航精度研究。将金属球和光学跟踪标记安装在骨盆模型上,然后对骨盆模型进行螺旋CT扫描。根据CT数据测量了球与光学跟踪标记的相对位置关系。然后我们将金属球的位置标记为c1,这被认为是注册前位置的地面真实。然后,我们对骨盆模型和跟踪器进行了CBCT扫描。将骨盆和跟踪器的CBCT模型分别与骨盆和跟踪器的CT模型配准,得到跟踪器与骨盆的相对位置关系,从而完成术中实时三维导航。导航软件计算出骨盆上金属球的坐标(C2)。C1和C2之间的差异是登记误差值e1(e1=|c1-c2|)。每组模型测试三次,取平均值。为了综合分析配准误差值,我们还对模型配准结果的全球三维点云误差的误差分布进行了分析和展示。我们使用预装的金属球。在骨折前测量F2上金属球的坐标,作为复位前的地面实况(C3)。根据自动复位算法,利用机器人系统完成骨折的复位。测量金属球在F2上的中心坐标为复位后的位置值(C4)。C3和C4之间的距离是减缩误差值E2(E2=|C3-C4|)。每组模型测试三次,取平均值。分析并给出了模型归约结果的全球三维点云误差分布。
20个模型的平均配准误差E_1为1.29±0.57 mm。20个模型的平均复位误差为2.72±0.82 mm。不同解剖标志点的平均配准误差E1和归约误差E2如表1所示。一个模型骨折侧全局三维点云的配准误差分布显示,随着误差值的增加,点云颜色将从黄色变为红色(图9)。一个模型断裂侧全球三维点云的简化误差分布显示,随着误差值的增加,点云颜色将从黄色变为红色(图10)。

表1不同解剖标志点的平均配准误差E_1和归约误差E_2
F1的髂前翼;F1的B髂后翼;F1的C髋臼;F1的D骶骨;F1的耻骨上支;F1的耻骨下支;F2的耻骨前翼;F2的H;F2的髋后翼;F2的髋臼
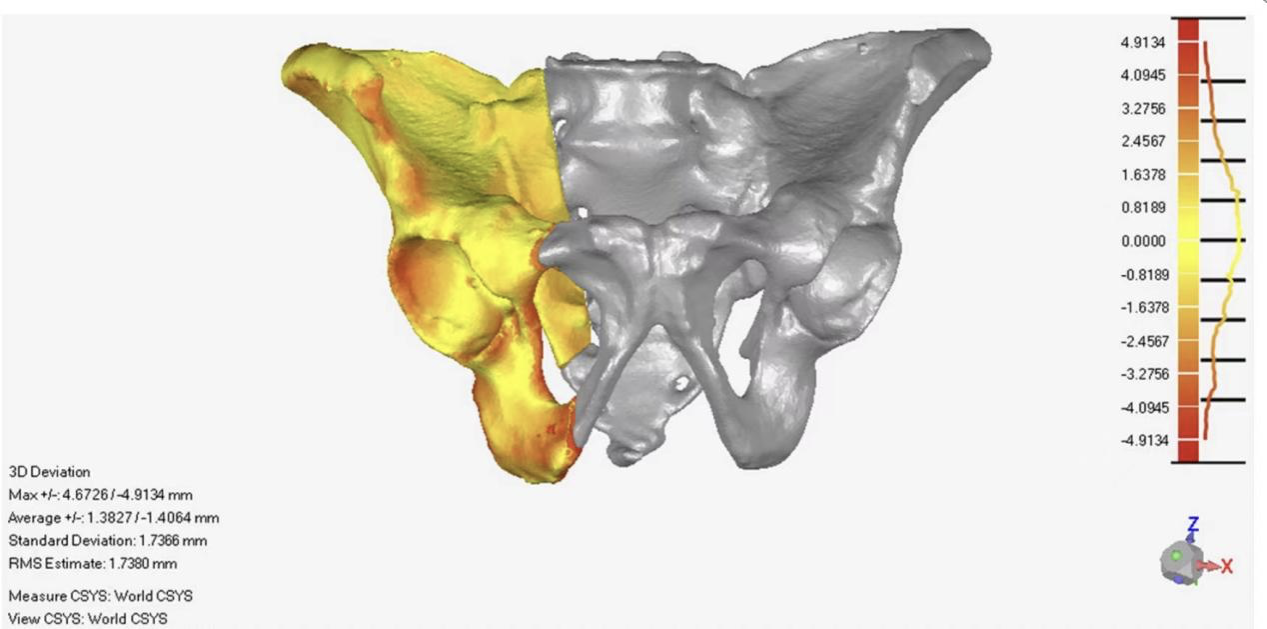
图9一个模型断裂侧准误差分布
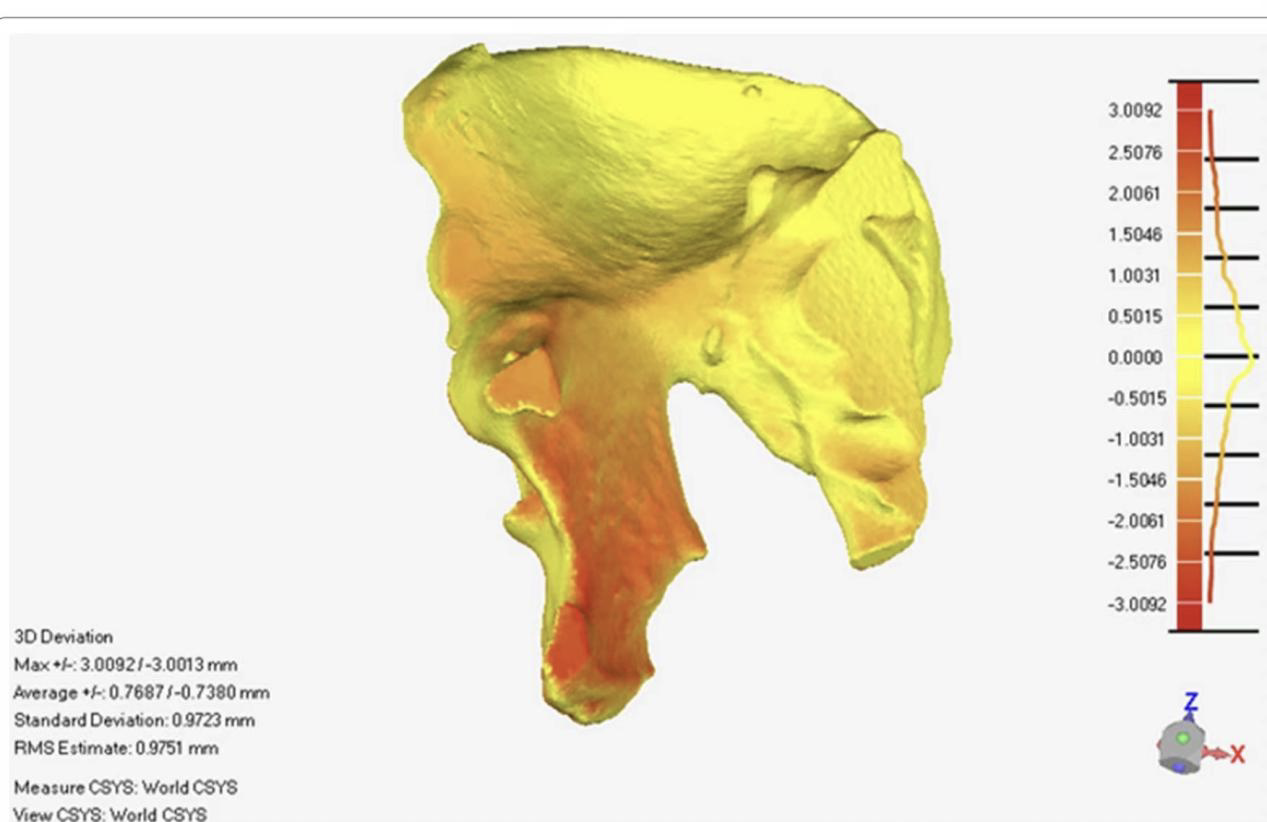
图9一个模型整体的准误差分布示意图
综上所所述,RAFR实现了术中实时三维图像导航,可以计算特定的复位参数,从而智能地规划复位路径,从而可以在术前分析和规划骨折复位的战术过程。我们的自行研制的机器人复位系统能够按照规划的路径成功地对骨折碎片进行了整复,图像配准误差和骨折复位误差的准确度都很优秀,能够达到临床环境的要求。

