 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2022年11月
Chunpeng Zhao, Mingjun Guan, Chao Shi, Gang Zhu, Xiangyang Gao, Xiangrui Zhao, Yu Wang & Xinbao Wu (2022) Automatic reduction planning of pelvic fracture based on symmetry, Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, 10:6, 577-584, DOI: 10.1080/21681163.2021.2012830
骨盆骨折是一种严重损伤,发病率约50%~60%,死亡率约10%~16%。骨盆骨折手术治疗的第一步也是最重要的一步是骨折复位,以恢复骨盆环的解剖结构和稳定性,尤其是对于那些不稳定和移位的骨盆骨折。骨盆复位不良可能导致畸形愈合、双腿不等长以及腰椎、髋关节和膝关节的继发功能障碍,从而对患者生活产生严重的影响。
复位过程中往往有2点比较重要,①碎片的实时位置和②骨折碎片复位的目标位置。以往骨科医生术中通常使用X线图像来确定传每个骨盆骨折块的相对位置,而随着计算机辅助手术技术的发展,一些导航系统被引入到对于骨骼的追踪领域,比如将3D扫描设备和导航系统结合使医生在术中可以直接看到整个骨盆,比如通过机器人经皮置入椎弓根螺钉等。以上系统往往可帮助实时位置的确定,而目标位置往往需要手术医生人为确定。因此,本研究基于骨盆的对称性,提出了一种虚拟复位计划方法,称为骨盆对称复位(pelvic symmetry reduction,PSR),用于骨盆骨折的治疗。
(一)PSR方法介绍
将健康的骨盆CT数据导入Mimics 17.0图像处理软件并进行自动分割和重建为3D模型之后,将模型分成两部分以模拟骨折,骨折线设置在骶骨、耻骨前支和后支上。如图1.I,与脊柱相连的是骨盆的主要部分(红色),另一部分是骨折部分(黄色)。
为了通过对称特征重建骨盆结构,在PSR方法中重复使用了两种操作,包括沿矢状面镜像(SP镜像)和通过迭代最近点( iterative closest point, ICP)算法配准(ICP配准)。以下所有操作,包括SP镜像、ICP配准和布尔运算,都可以在Mimics 20.0上轻松实现。
根据之前的统计和临床报告,大多数人认为骨盆是对称的,因此,骨折碎片的正确位置应与未受伤一侧的相应位置理论上镜像对称。基于此,本文提出的PSR方法,包括三个部分(如图1):
(1) 获得目标域(region of interest,ROI)
在从患者CT重建的骨盆骨折模型中,骨折块(F1)与骨盆主要部分(M1)分离,如图2所示。F1的镜像块(F1_SP,图1.II)是通过SP镜像获得的。由于CT的矢状面不是骨盆的精确生理对称面,SP镜像后F1_SP与M1的对应部分无法完全重合(F1_SP/M1,图1.II)。因此,将F1_SP和M1利用ICP配准,并获得F2(图1.III)。配准后,F2与另一侧的对称位置重合(F2/M1,图1.III)。通过布尔运算去除M1上F2对应的部分来获得ROI,用于生理对称性计算。
(2) 生理对称性的实现
由于人体生理结构的不完全对称性,两侧骨盆的细节存在差异,获得的ROI也不完全对称(图1.IV)。不是直接通过ROI计算生理对称平面,而是ROI的镜像片段(ROI_SP,图1.V) 与ROI本身进行ICP配准而获得,从而实现生理对称性。F3是ROI通过生理对称生成的片段,两个模型的中间平面是所需的生理对称平面。因此,F3被认为是生理对称后的骶骨。
(3) 骨折复位目标位置的获取
将F3与F2合并(M2,图1.VII),通过SP镜像,生成修复后的图像。然后,它与ROI配准后到达正确的位置(M3,图1.VIII)。最后,把F1配准到M3,可以获得骨折复位的目标位置(图1中的绿色区域,IX)

图1 PSR方法的流程图(“/”表示一起显示两个骨块)。
流程由三个部分组成,包括ROI的提取、生理对称性的实现以及复位目标位置的获取。I.断裂骨块的形状。 II. F1_SP是通过F1的SP镜像生成的。III. 在将F1_ SP配准到M1之后生成F2。IV. ROI是通过布尔运算去除M1上的F2而得到的。V. ROI_SP是通过ROI的SP镜像生成的。VI. F3是在将ROI_ SP配准到ROI之后生成的。VII. M2是修复后的受损侧的镜像(通过将F3与F2合并)。VIII. M3是修复后的受损侧(SP镜像并配准到ROI后到达正确位置)。IX. 将F1配准到M3之后到达复位目标位置(绿色区域)。
(二)PSR方法准确性的实验评估
我们通过解剖标志的误差和整体三维点云的误差分析了PSR方法的准确性。本实验使用了15组健康的骨盆数据,以人工骨折前的健康数据为基础进行误差计算。选择骨折碎片上的四个解剖标志(Ppr、Pir、Pil和Paf)进行测试,分别位于耻骨支、坐骨支、髂骨和髋臼顶。
(1)解剖标志误差
解剖标志的误差分为平移误差和旋转误差两部分。平移误差是指健康骨盆上的解剖标志与复位后骨盆上的相同标志之间的距离。四个标志点的其他三个用于建立坐标系。旋转误差是指健康骨盆的坐标系与复位后骨盆坐标系之间的角度,通过一系列公式计算得出。经计算,PSR法所有标志点的平均平移误差的ΔL、ΔX、ΔY和ΔZ分别为2.94mm、1.09mm、1.91mm和1.29mm。PSR法每个地标的平移误差分别为2.87mm、3.02mm、3.15mm和2.72mm。PSR方法在X、Y和Z轴上计算的平均旋转误差为1.08°、0.67°和1.96°。
2.全局三维点云错误
PSR方法对15个人工骨折骨盆的结果如图2所示。根据临床评估,除了10号样本(具有显著的异常生理不对称性,未包括在随后的统计分析中)外,所有这些结果都是可接受的。每组的平均误差均在4mm以内,最大误差在10mm以内(不包括第10组)。
图3单独显示了12号样品的结果。随着误差的增加,点的颜色从绿色变为红色。误差的分布大致符合正态分布,其中97.3%误差在3毫米以内,如图3(c)所示。髂嵴、髂后上棘、坐骨下缘、耻骨上缘误差较大,髋臼、髂翼、髂前上棘误差较小。在其他14个结果中也观察到了类似的现象。
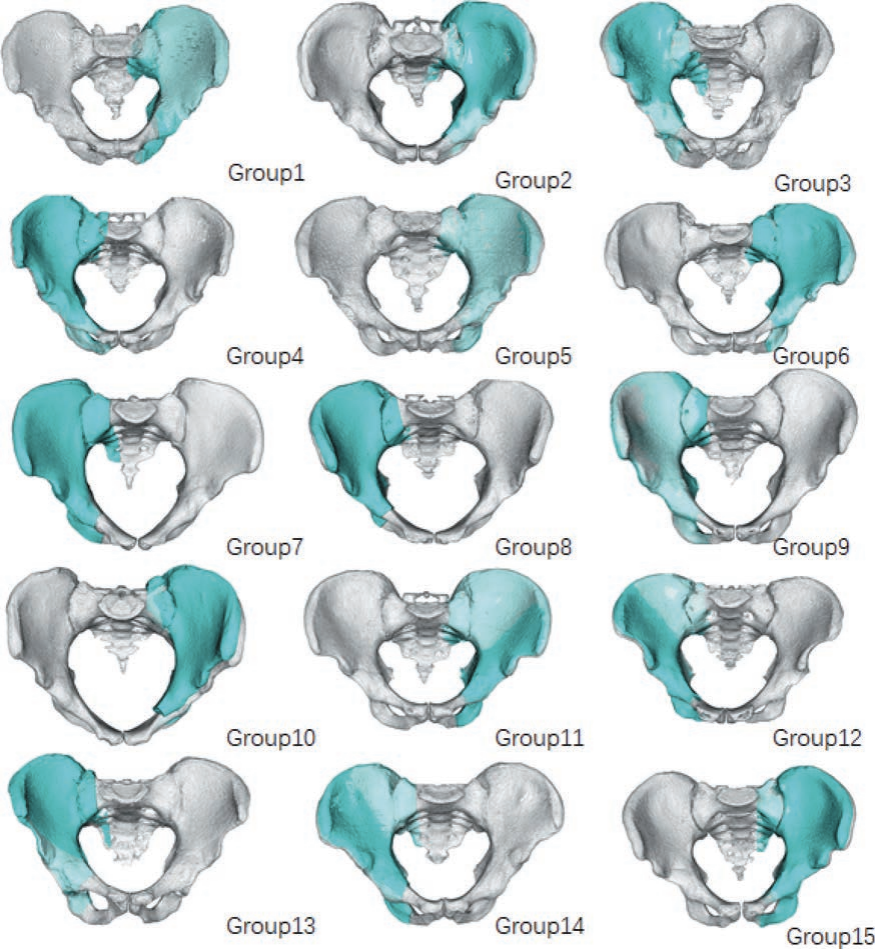
图2 PSR方法在15例人工骨盆骨折中的应用结果。灰色区域是完整的骨盆,青色区域是复位后的骨折碎片。
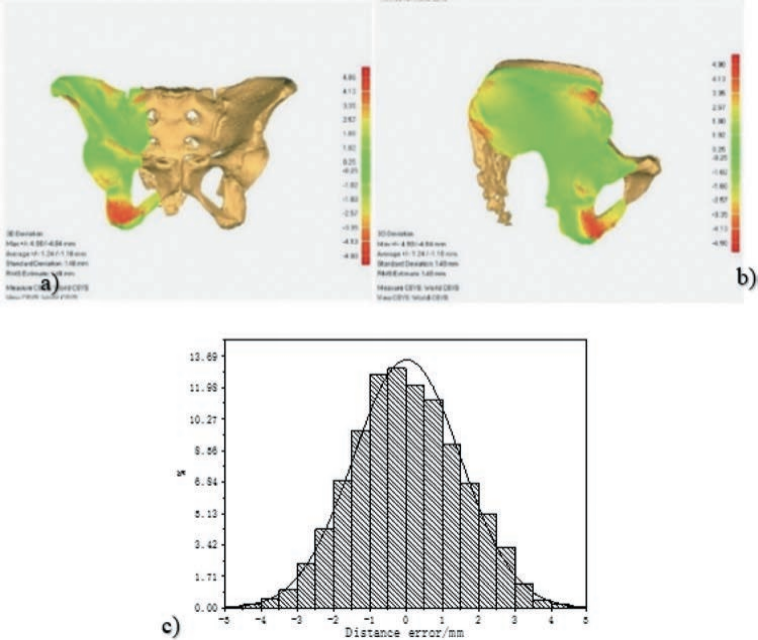
图3. 第12号样本的整体误差距离分布。图a)和b)是骨折块上的误差分布。图c)是误差的统计结果。
(三)PSR方法的有效性验证
为了验证PSR方法在临床骨盆骨折复位中的有效性,对三组骨盆骨折的CT数据进行了测试,并由北京积水潭医院的资深创伤骨科医生对结果进行了判断。其中一个结果如图4所示,包括复位前后的骨盆三维图像。复位结果得到了临床医生的认可,骨盆环结构基本恢复。
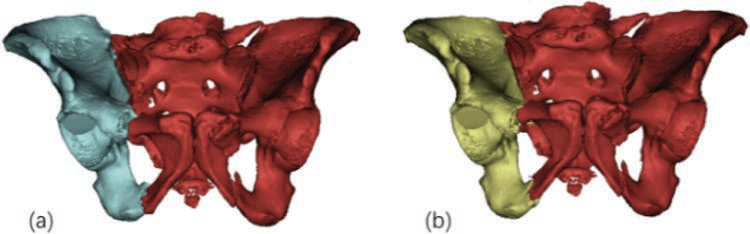
图4 PSR方法在骨盆骨折CT中的应用。红色区域是骨盆的主要部分。a)中的蓝色区域和b)中的黄色区域分别是复位前、后骨折块的位置
本研究开发并测试了一种基于对称性的骨盆骨折自动复位计划方法。人工骨折模型和实际骨折骨盆的实验结果表明,该方法具有较高的复位精度和有效性。评估试验将在未来的工作中包括对实体模型和患者的进一步实验。我们还将参考其他相关方法对该方法进行优化,以改善其不足之处,带成熟后将其集成到骨盆骨折复位机器人中。
通过这种方法,可以有效地生成个体化的定量结果,以帮助骨科医生更好地制定手术计划,并评估手术结果的影响。该方法的结果也可用于指导手术机器人,提高其自动化程度。

