 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2023年02月
Zhao C, Cao Q, Sun X, Wu X, Zhu G, Wang Y. Intelligent robot-assisted minimally invasive reduction system for reduction of unstable pelvic fractures. Injury.2023 Feb;54(2):604-614. doi:10.1016/j.injury.2022.11.001. Epub 2022 Nov 4. PMID:36371315.
骨盆骨折占所有骨折的2%-8%,它们往往是由高能量创伤引起的,这些患者往往有多处损伤。骨盆骨折的主要特征是骨盆环骨折和骨折移位。稳定型骨盆骨折的准确复位已被公认为治疗不稳定型骨盆骨折的基石。研究表明,骨折碎片的错位和旋转不良通常会导致术后并发症,例如骨折愈合不愈合或骨折不愈合。骨盆复位不良导致的骨盆倾斜或肢体缩短可引起步态改变和行走困难等并发症,从而显著影响患者的长期生活质量。63%的骨盆骨折复位不良的患者会出现持续性疼痛。28%的骨盆骨折复位不良患者出现感觉和运动异常,32%的患者无法继续以前的工作。
传统的切开复位和内钢板固定技术可以实现准确的复位,但非常依赖外科医生的经验,并且对附近的关键血管、神经和腹部器官有医源性损伤的风险。近年来,闭合复位和微创内固定已成为治疗不稳定型骨盆骨折的趋势,需要强调的是,闭合复位技术在有效缩短手术时间、减少失血量、减少感染、神经和血管损伤等并发症方面具有一定的优势。在传统的微创骨折复位术中,外科医生必须在持续的术中透视监测下手动复位骨折碎片,导致患者和医务人员的术中辐射暴露量很高。由于 C 型臂的成像能力有限,骨折复位主要取决于外科医生的技术和经验。随着机器人技术的发展,机器人辅助骨科手术(RAOS)已应用于各种骨科手术,包括全膝关节置换术、全髋关节置换术、脊柱手术、骨肿瘤手术、关节镜手术和骨折固定。然而,目前RAOS技术在骨折中的临床实践主要集中在定位和螺钉放置上。很少有研究关注机器人辅助骨折复位。
经过仔细研究,我们的团队利用三维(3D)成像数据、导航和机器人技术等现代技术,开发了一种用于骨盆骨折的智能机器人辅助骨折复位(RAFR)系统。在之前的实验中,我们测试了RAFR系统在图像配准和骨折复位方面的准确性,并取得了良好的结果。现在,我们已经制定了一种使用RAFR系统进行骨盆复位的自动化手术程序。我们已经使用我们的 RAFR 系统对22例不稳定骨盆骨折进行了骨盆骨折复位术。本研究的目的是:分析我们的 RAFR系统的安全性和有效性;并讨论RAFR系统在骨盆骨折复位方面的手术策略、技术和局限性。
研究方法如下:
纳入标准:闭合性、不稳定的骨盆环损伤(Tile 型 B 型或 C 型骨折),伴有骨折移位。
排除标准:(1)存在严重的开放性损伤或腹盆腔和器官破裂并伴有伤口污染;(2)血流动力学不稳定;(3)CBCT采集图像区域的金属内固定板或螺钉等硬件或严重肥胖导致图像采集不良;(4)局部皮肤状况不佳,或螺钉插入部位或周围软组织感染;(5)不能耐受麻醉或手术;(6)稳定的骨盆环损伤(Tile A型骨折)
1.术前治疗
血流动力学不稳定的患者采用临时盆腔外固定治疗。垂直不稳定的患者接受下肢牵引治疗。使用 X 线检查进行骨盆常规成像,包括前后位、入口和出口位以及 CT 扫描。根据骨盆环的损伤类型、复位的有效性和骨道的可用性制定手术计划。
2.智能RAFR系统
RAFR系统由两个主要部分组成:一个主要部分是基于3D视觉的智能手术机器人系统。它是机器人的核心结构,由三部分组成(图1A):骨盆骨折复位软件(包括复位路径规划软件、术中导航和配准软件)、光学跟踪装置(NDI Polaris Vega和跟踪器)和复位机器人(UR16e)。光学跟踪装置连接到患者的骨盆和机器人,用于复位过程中的实时跟踪。另一个主要部分是机器人的辅助结构。它由两部分(图1B)组成:两个通过设计的U形装置连接到手术台的夹持装置和安装在手术台末端的弹性牵引装置。健康侧保持设备由两个九自由度(DOF)电控被动臂(Pass Arm 1,Rossum Robot Co., Ltd.,RPC)组成,以实现健康侧骨盆的稳定固定。弹性牵引装置由电动螺母驱动,提供定量牵引并抵抗骨盆周围软组织的结合力。其他手术设备包括C型臂X光机(德国西门子)。
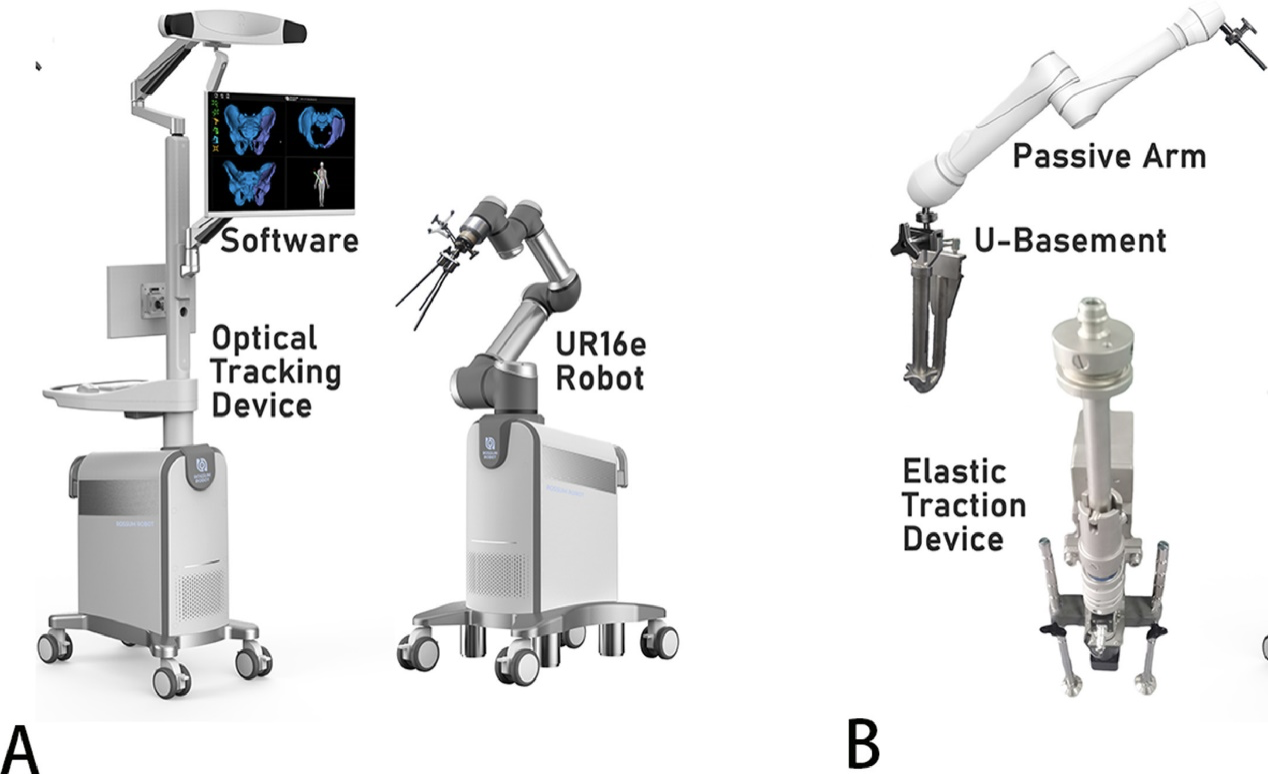
图1.A.由骨盆骨折复位软件、光学跟踪装置和复位机器人(UR16e)组成的机器人系统核心结构;B.机器人的辅助结构,由两个夹持装置组成,通过设计的U形装置和一个弹性牵引装置
RAFR系统的术前准备
术前常规进行盆腔三维CT采集,通过计算机软件将骨盆骨折图像分为健康侧和患侧两部分(图2A)。基于人体的镜像对称原理,未受伤半骨盆的镜像模型可以看作是受伤半骨盆的解剖位置。医生可以稍微调整目标位置,最终生成临床上满意的复位目标位置(图2B)。基于目标位置,RAFR系统开发了一种采用最短路径规划的自动减速算法(图2C)。如果在复位过程中发生任何撞击,外科医生可以手动设置一个或多个路径点以避免撞击。我们打印了复杂骨折的骨盆三维模型,并提前模拟了骨折复位过程,以确保复位过程的顺利进行。
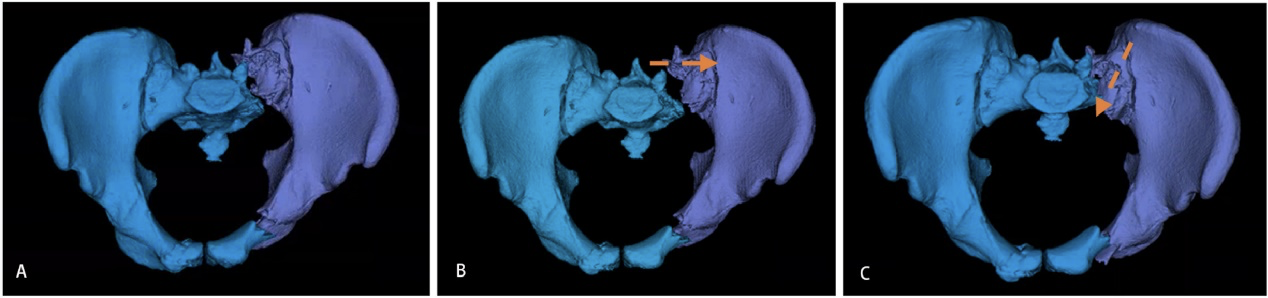
图2.A.术前CT重建模型;B.复位计划的术前路径规划;C.路径规划的最终目标位置
3.手术策略和程序
孤立性盆腔前环损伤采用耻骨支经皮空心螺钉固定治疗。骨盆后环损伤采用骶髂关节经皮空心螺钉固定治疗。复杂的前骨盆环损伤采用空心耻骨支螺钉固定、INFIX固定或“混合手术”(切开复位和内钢板固定)治疗。
外科手术
• 1.患者仰卧在半透明的骨科手术台上,髋关节略微抬高。他们接受了全身麻醉以减轻肌肉紧张。机器人系统在手术室中的空间位置如图3A所示。两个抱臂的U形底座与手术床的健康侧相连,两个抱臂底座的位置距离骨盆60 cm,以便在手术过程中进行图像采集、透视验证和内固定时提供足够的空间(图3B)。通过常规消毒和覆盖对皮肤进行消毒。
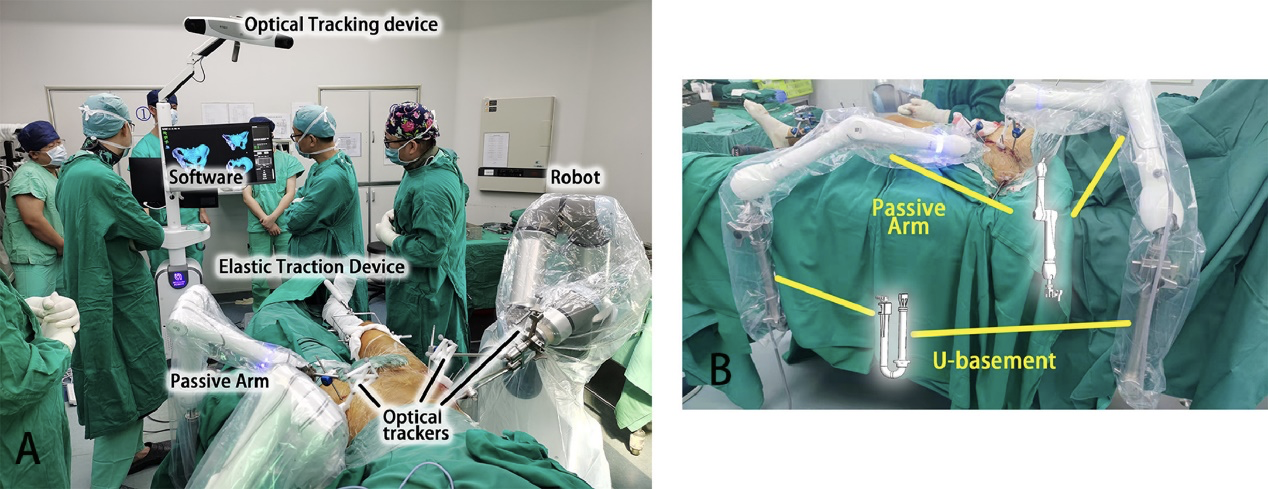
图3.A.机器人系统在手术室的空间位置B.两个固定臂的U形底座连接到手术床的健康侧
• 2.在两侧髂前上棘上固定一个跟踪器,并插入两根克氏针以达到稳定固定。
• 3.骨盆和跟踪器的锥形束 CT (CBCT)数据由 C 臂 X 光机(德国西门子)收集。将CBCT数据传输到计算机系统,与术前CT 3D图像进行图像配准。导航配准软件将重建的高分辨率CT与CBCT进行配准,可以实时跟踪骨盆的位置并显示在屏幕上(图4)。
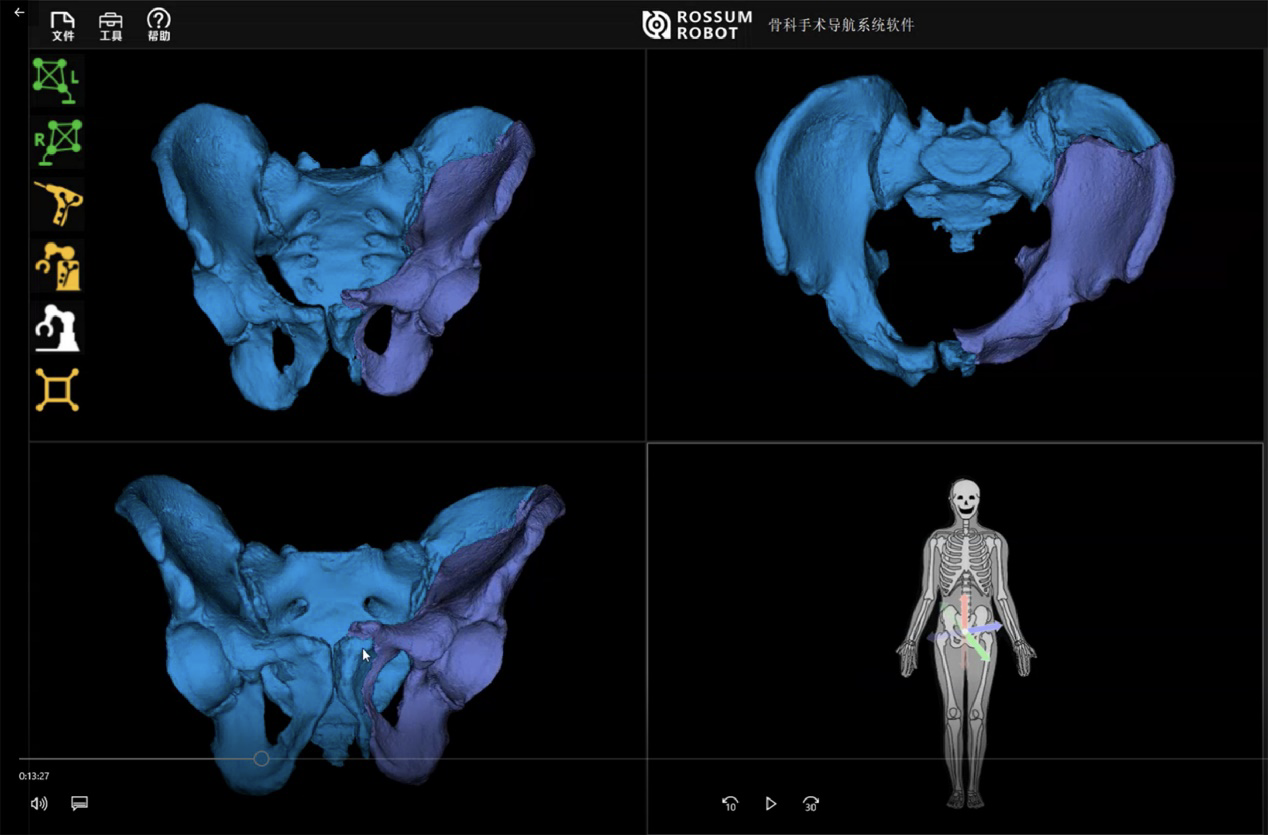
图4.图像配准后,可以实时跟踪骨盆的位置并显示在屏幕上。
• 4.图像配准后,通过用无菌保护套组装固定两个固定臂和机械臂末端,为机械臂建立无菌工作环境。
• 5.我们设计了一个手钻导航系统。导航软件可以计算出克氏针放置的最佳位置。光学导航装置可以跟踪安装在手钻上的跟踪器;然后,软件可以实时显示克氏针的深度和位置。在健康的半骨盆中,将两个克氏针(直径5mm)放置在髂骨翼最宽的部分(臀肌粗隆位置)和髋臼圆顶上方的髂前下棘(LC2螺钉的位置)。在受影响的骨盆中,除了两个与健康侧相同的克氏针外,第三个克氏针水平插入髋臼顶部(图5)。所有克氏针都稳定地固定在辅助机械臂的末端。
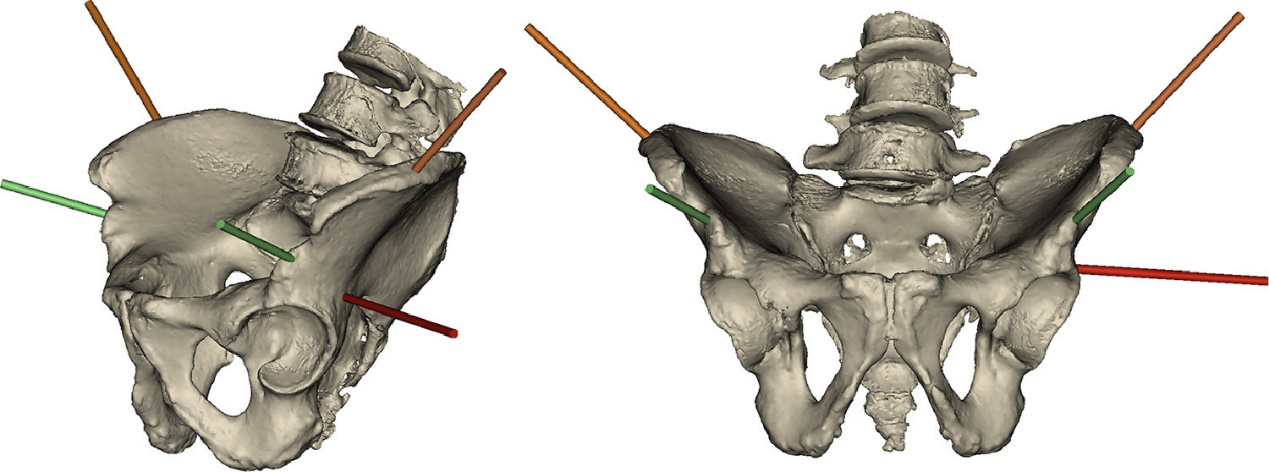
图5.两个克氏针放置在髂骨翼最宽的部分(臀肌粗隆位置)和髋臼穹顶上方的髂前下棘(LC2螺钉的位置)。在受影响的半骨盆中,第三个克氏针水平插入髋臼顶部上方
• 6.对骨盆骨折垂直移位的患者进行髁上骨牵引术。骨牵引与弹性牵引装置连接。根据配准后的三维导航图像变化动态设定牵引力,运行过程中牵引力保持不变。
• 7.机械臂根据术前复位计划缓慢移动骨盆患侧,直至达到目标复位位置。所有还原过程均在3D实时导航的监督下完成。最后,将断裂碎片移动到目标位置,完成机器人的主动复位。通过透视验证还原的位置。
• 8.确定治疗的种植体的选择主要基于骨折的分类。孤立性盆腔前环损伤采用经皮骶髂关节插管螺钉固定治疗骨盆后环损伤;采用耻骨支套管螺钉内固定、INFIX内固定、外固定器或小翼板治疗复杂的前后骨盆环损伤。
• 9.通过透视验证植入物的位置。皮下层和皮肤缝合,手术完成。
• 10.图6、图7为典型病例表现:56岁男性新月形骨盆骨折(C图)合并腰椎4、5椎骨折(盆腔手术后第二次脊柱手术)和右肱骨近端骨折(保守治疗)。入院后第7天,用我们的机器人系统完成微创闭合复位手术,后骨盆环损伤采用经皮空心螺钉固定治疗。
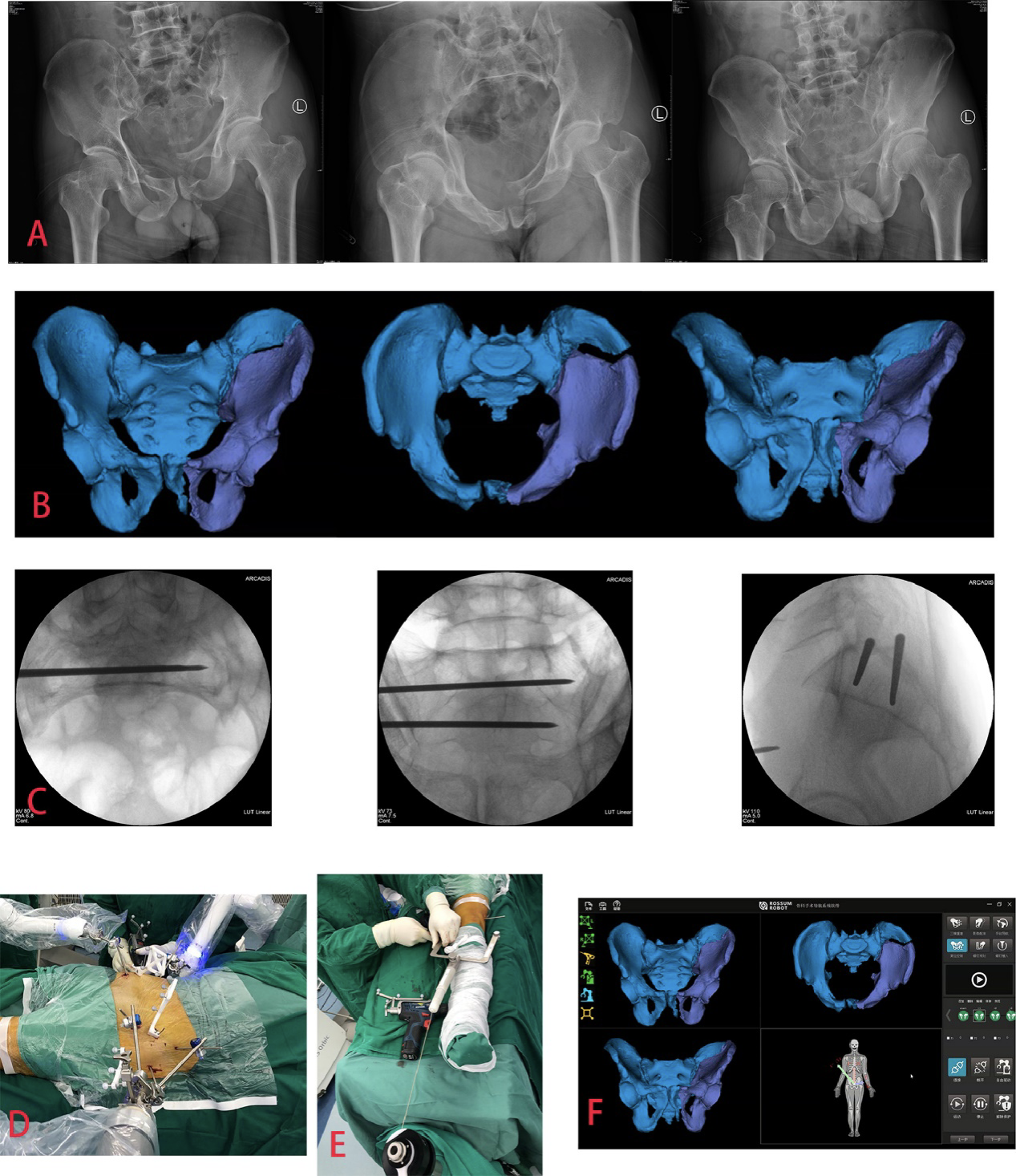
图6.典型案例介绍。
A:使用三种标准盆腔影像学视图对不稳定骨盆骨折进行术前 X 射线检查:前后、入口和出口视图.
B:复位规划的术前路径规划。
C:从健侧的骨盆后环插入骶髂螺钉引导销。复位完成后,导销可直接穿透患侧骶髂关节,辅助后环的临时固定,也可穿过患侧骨盆皮肤,引导后环骶髂螺钉固定。
D:所有克氏针钉都用机械被动臂的末端稳定固定。
E:骨牵引与弹性牵引装置连接。
F:完成图像配准、骨盆抱持和弹性牵引后,骨盆骨折的位置直接显示在监视器中。

