 北京市新街口东街31号
北京市新街口东街31号 邮编:100035
邮编:100035 admin@网站
admin@网站- 数据库登录
2023年12月
肖鸿鹄,赵春鹏,曹奇勇,张立佳,葛宇峰,朱罡,王豫,吴新宝.智能化骨折微创复位手术机器人系统治疗不稳定型骨盆骨折的随机对照研究[J].中华创伤骨科杂志,2023,25(4):341-350.DOI:10.3760/cma.j.cn115530-20221225-00650.
对于大多数骨科医生而言,不稳定型骨盆骨折的切开复位内固定手术都是其所需面对的巨大挑战。传统切开复位内固定手术损伤大、难度高,需要反复学习才能熟练掌握。当前,微创治疗骨盆骨折已经成为新的研究趋势和发展方向。骨盆骨折的微创手术技术已经逐步由传统的透视下经皮螺钉或外固定支架,皮下内固定架固定过渡到了机器人辅助定位、通道螺钉置钉的阶段。本研究团队近几年来进行了一系列机器人辅助骨盆骨折微创复位系统的试验和临床前研究,旨在对机器人辅助骨盆骨折微创复位的可行性进行探索,证实其安全性和有效性。
(一)机器人技术
术中机器人系统由北京罗森博特科技有限公司提供,型号为RR01。该机器人可以实现术中实时3D导航,并基于临床标准实现自动手术规划,在力-位双重监控下完成复位操作。RR01主要由主控台车(含光学跟踪系统)和机械臂台车组成。同时,安装固定在手术床旁的被动把持臂和安装在床尾的弹性牵引装置,构成机器人的辅助结构。健侧把持系统由2个九自由度电控被动臂实现健侧骨盆的稳定把持,通过设计的U型连接装置与手术床连接。弹性牵引装置由本体、牵引工具组成,牵引工具包括牵引弓、弹性体和无菌连接杆,可进行高温高压消毒。本体通过外接电源控制电机旋转,可设定并维持0~30kg的稳定牵引力,对抗骨盆周围软组织约束力。

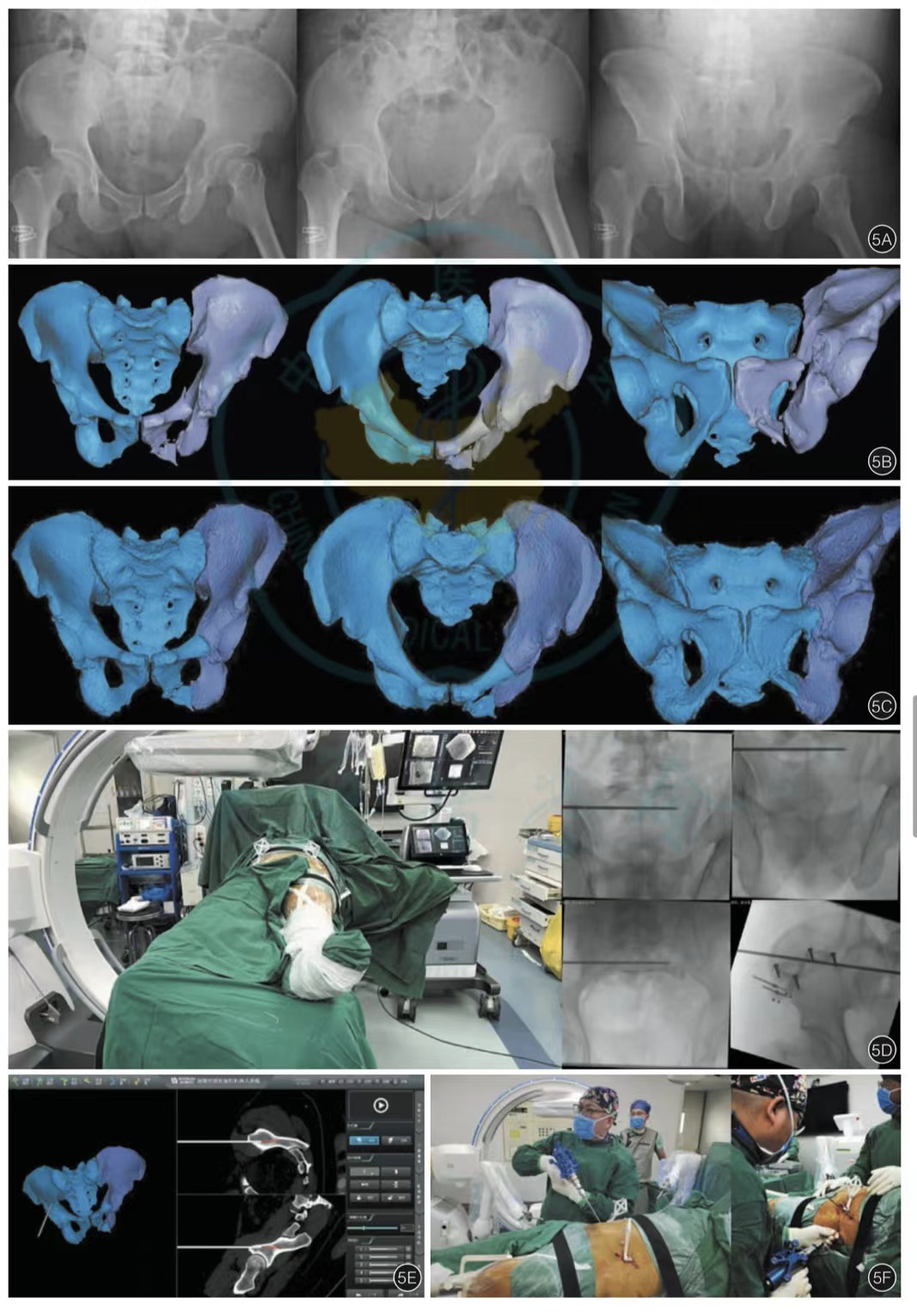
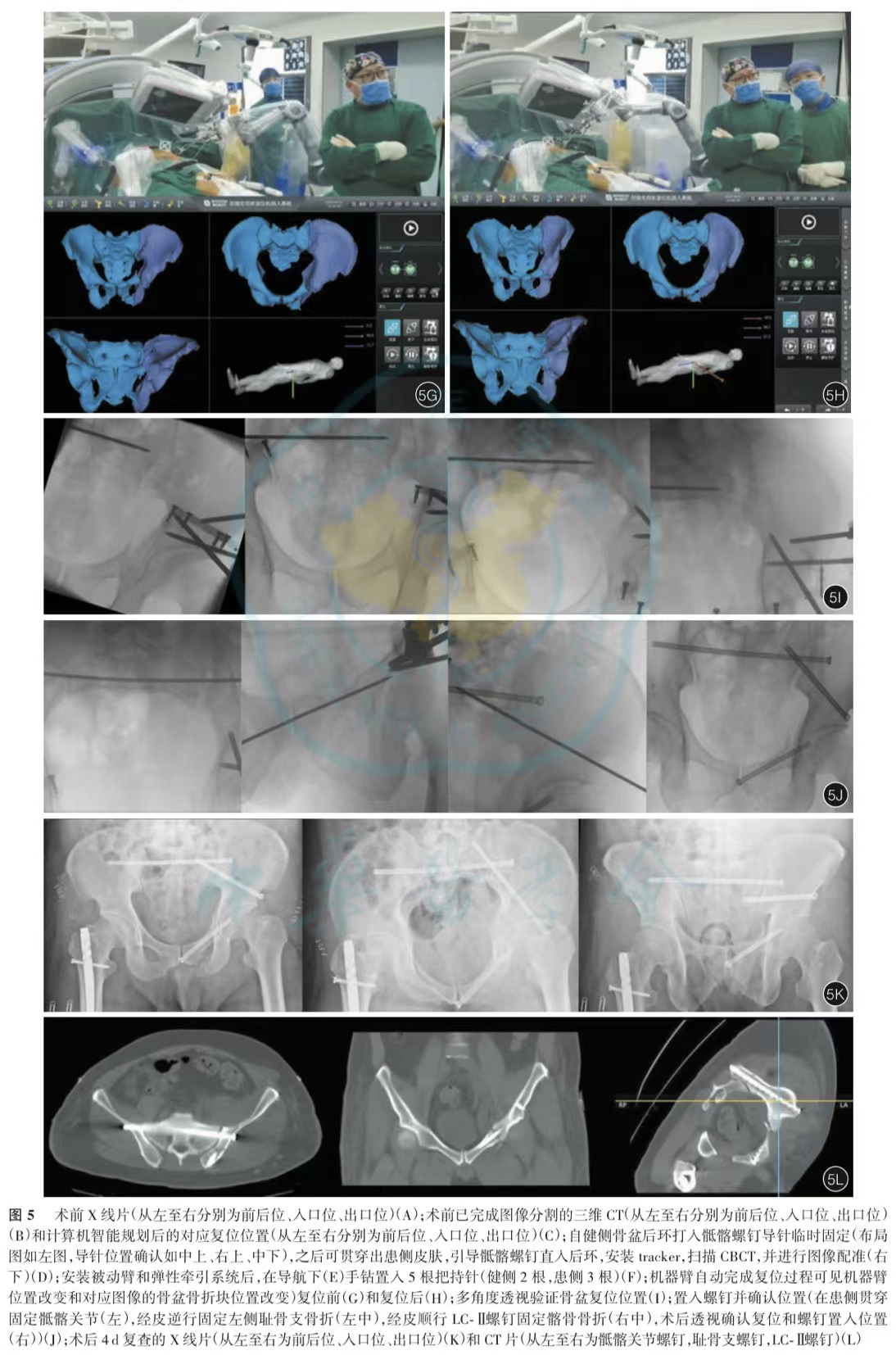
所有患者术前均完成骨盆三维CT扫描,由复位规划软件对骨盆图像进行图像分割,识别、区分重要骨折块并进行标定,根据骨盆对称性原则规划复位的位置并设计复位路径(图5)。规划后,医生需要对规划结果进行最后审核,必要时手术医生微调复位路径,对路径设置路点(复位过程中移位骨折块必须经过的空间位置),避免在复位过程中出现骨折块之间的撞击、绞锁或阻挡。
(二)机器人辅助微创复位手术过程
1、患者采用全身麻醉以降低肌张力,仰卧于透光手术床,臀部垫高。在健侧放置把持系统U型基座,距离骨盆约60cm距离,以防止术中采集图像及进行内固定时对C型臂X线机产生空间阻挡,同时便于手术消毒铺巾。
2、在患者骨性结构上置入示踪器,通常是双侧的髂前上棘。首先由C型臂X线机(德国西门子公司)拍摄标准的骨盆前后位和侧位片,校准扫描中心,再利用C型臂X线机的锥束像CT模式对骨盆进行270°扫描,并将数据传输到机器人计算机系统,与术前CT3D图像进行配准和验证,匹配率大于85%方可满足手术需要。
3、分别向患侧和健侧骨盆置入5.0mm Schanz针用于把持。健侧骨盆上的把持针与固定工具相连接,患侧骨盆上的把持针与机械臂末端的把持工具相连接。其中,健侧半骨盆2枚把持针分别置入髂骨翼最宽处(臀肌粗隆位置)和髂前下棘入点的髋臼上方(LC2螺钉位置)犤10犦;患侧半骨盆除2根把持针与健侧相同外,再附加水平打入髋臼顶上方的第3枚把持针。对于存在骨盆垂直移位的患者,连接弹性牵引装置并依照需要进行消毒铺单;实施复位时,将牵引弓通过克氏针连接于于股骨髁上,根据配准后的影像变化动态设定牵引力量。由于弹性体的存在,末端牵引力可以传导到骨盆上从而提供垂直牵引的对抗力,同时保证各复位方向的运动灵活性,有效降低复位所需载荷。
4、在三维导航的实施监督下,复位机械臂根据复位规划路径进行患侧半骨盆进行自动复位。在骨折复位过程中,个别患者可能出现机器人复位力不足,此时导航显示屏幕可以看到三维阻力数值超过了机械臂负载。这时系统可以切换到辅助力模式,即医生手持机器人末端三叉连结装置,根据导航屏幕显示复位阻力三维指示进行推动对抗阻力,使得三维力超负荷部分减少到机械臂负载范围内。此时机械臂可以继续按照之前的规划进行复位运动,直至到达规划复位位置。
5、复位完成后机械臂自动锁定,维持骨盆位置。医生此时通过透视验证骨盆骨折复位结果是否达到满意位置,并与导航跟踪三维影像进行对照验证。
6、根据骨折类型及骨盆稳定需要,对骨折进行各种经皮通道螺钉固定。必要时使用外固定支架、INFIX系统稳定固定骨盆前后环。
7、手术结束前拍摄标准骨盆前后位和出入口位,确保复位满意和通道螺钉放置正确。四、评价指标和随访方法手术当天记录透视次数和时间牗患者和医生在X线暴露下的次数和时间牘。术后3~5d拍摄骨盆前后位、出入口位的X线片及三维CT片,评估骨盆复位优良率,记录术后合并用药情况和术后不良事件发生情况。术后6、12周进行门诊随访。复查X线片评估骨折愈合情况,进行功能评分,了解手术部位有无感染,内置入物有无松动、退出、断裂的情况。
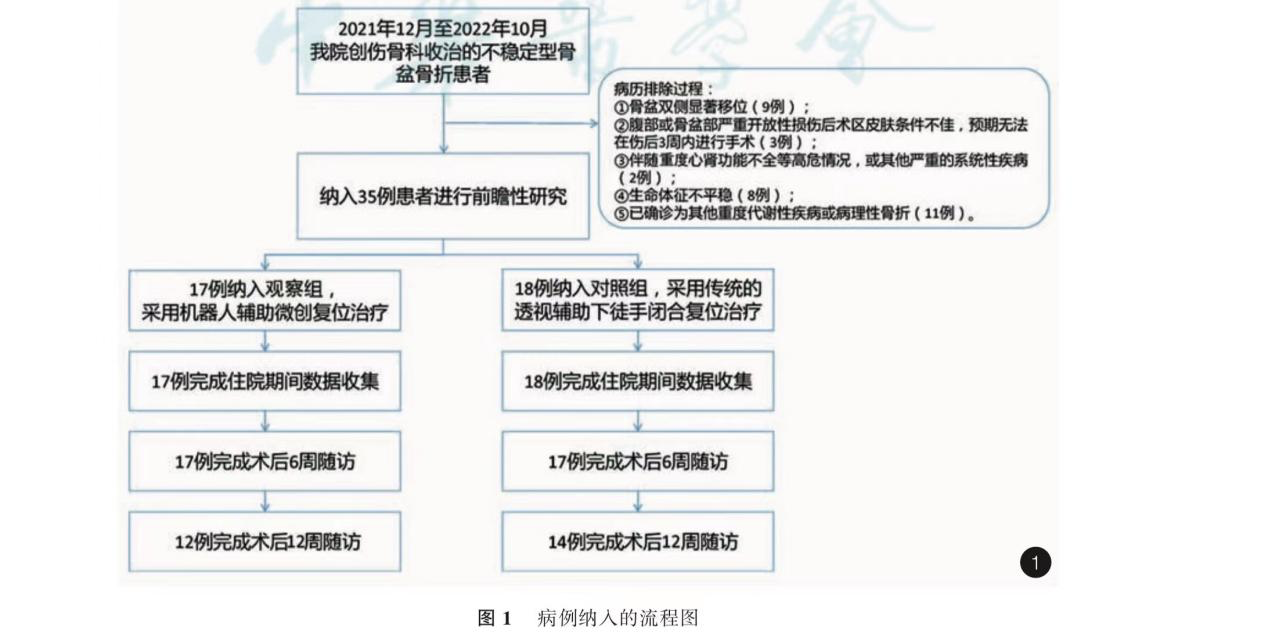
(三)病例纳入的方案
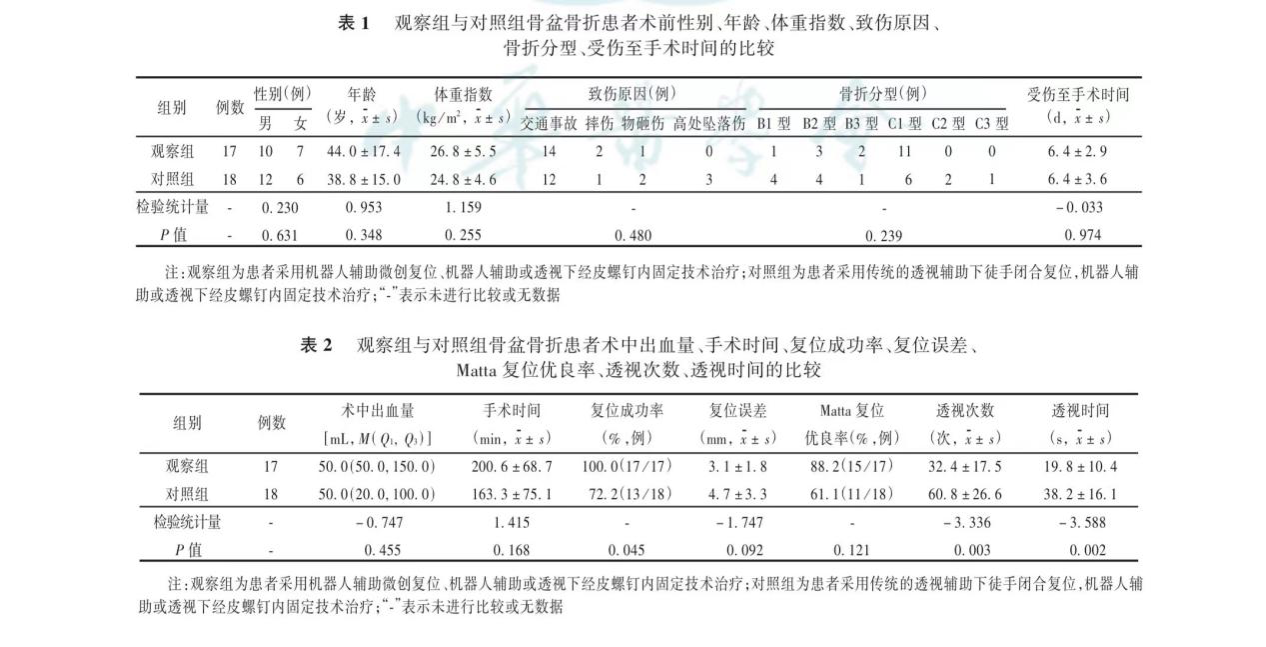
采用前瞻性随机对照研究方法,纳入2021年12月至2022年10月期间北京积水潭医院创伤骨科收治的35例新鲜不稳定型骨盆骨折患者。按照随机数字表法将患者分为两组:观察组采用机器人辅助微创复位、机器人辅助或透视下经皮螺钉内固定技术治疗。对照组采用透视辅助下徒手闭合复位,机器人辅助或透视下经皮螺钉内固定技术治疗。比较两组患者的术中出血量、手术时间、复位成功率、复位误差、Matta复位优良率、透视次数和时间、Matta功能评分等。
四.智能化骨折微创复位手术机器人系统治疗效果
结果两组患者术前一般资料比较差异均无统计学意义(P>0.05),具有可比性。观察组术中透视次数[(32.4±17.5)次]、透视时间[(19.8±10.4)s]均显著少于对照组[(60.8±26.6)次、(38.2±16.1)s],观察组复位成功率100.0%(17/17),显著高于对照组的72.2%(13/18),差异均有统计学意义(P<0.05)。两组患者在术中出血量、手术时间、复位误差、Matta复位优良率、12周Ma- jeed 功能评分比较,差异均无统计学意义(P>0.05)。
综上所述,智能化骨盆骨折微创复位机器人可以完成自主复位路径规划,并在三维影像的实时监控下完成骨盆骨折的微创复位,具有微创、准确、操作性强等特点;对新鲜的不稳定型骨盆骨折的微创治疗具有明显优势;随着我们临床应用的推广,相信骨盆骨折微创复位手术机器人系统一定会成为骨科医生治疗骨盆骨折的最强力助手。

